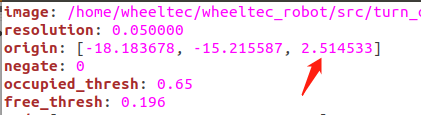
I want to rotate the map to align the car. So I changed the last item of origin in the yaml file as shown below.
But this modification also gave me an error, as shown in the picture below, two maps appeared in my rviz and it did not achieve the result I expected (the map where the car was located did not rotate).
Could you please elaborate more your question adding a little more description about the bigger picture what you want to achieve? Are you trying to localize your robot on the map? If so, I think the solution is the other way around, you need to modify the position of the robot on the map so that it align to the map in Rivz.
Please provide more details so that we can help you.