hello there, i have a simulation where iam trying to work on line following drone! for that i have used the environment of the line following turtlebot from this git down bellow;
and then i altered the launch file(lf.launch) of the above .git so that i can remove the turtlebot robot from that environment!
<launch>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name = "world_name" value = "$(find line_follower_turtlebot)/Maps/lfm1.world"/>
</include>
</launch>
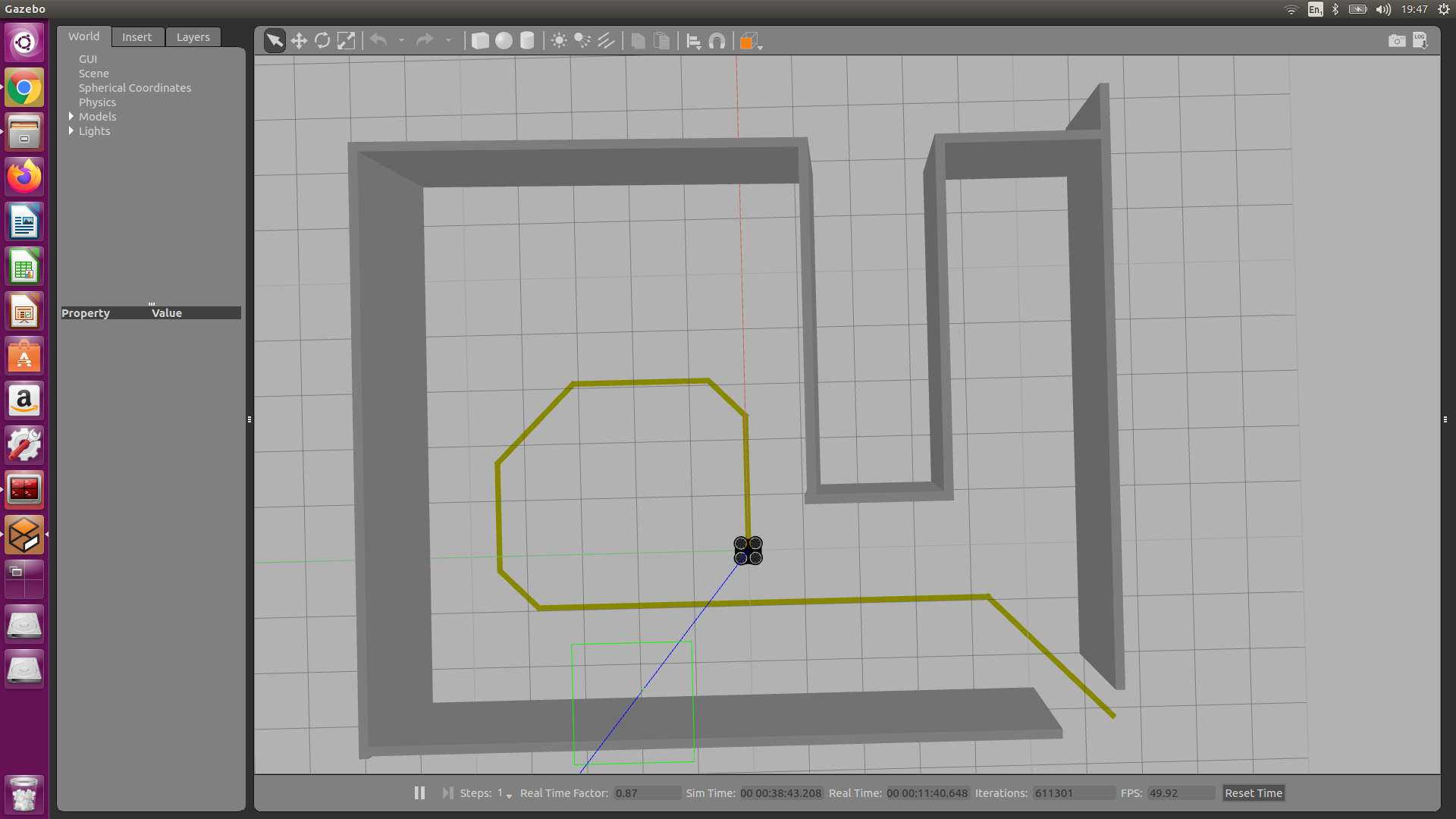
and used the command “roslaunch line_follower_turtlebot lf.launch”, and then i spawned the ardrone from the package https://github.com/eborghi10/AR.Drone-ROS.git using the command “roslaunch cvg_sim_gazebo spawn_quadrotor.launch” and it got succesfully spawned in the simulation as i wanted! like in the picture below!
and iam going to apply the code as instructed in this ROS Construct Live Sessions ROS Developers LIVE Class #86: How to use OpenCV with ROS - YouTube
so for me to use that code i want the ardrone 2.0 to take-off and hover in a particular altitude so i can enable the bellow code to make it follow the line in the simulation env!!
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import numpy as np
from geometry_msgs.msg import Twist
class LineFollower(object):
def __init__(self):
self.image_sub = rospy.Subscriber(
"/camera/rgb/image_raw", Image, self.camera_callback)
self.bridge_object = CvBridge()
self.speed_pub = rospy.Publisher("/cmd_vel", Twist, queue_size=1)
def camera_callback(self, data):
try:
# We select bgr8 because its the OpenCV encoding by default
cv_image = self.bridge_object.imgmsg_to_cv2(
data, desired_encoding="bgr8")
except CvBridgeError as e:
print(e)
height, width, channels = cv_image.shape
descentre = 160
rows_to_watch = 60
crop_img = cv_image[(height)/2+descentre:(height) /
2+(descentre+rows_to_watch)][1:width]
hsv = cv2.cvtColor(crop_img, cv2.COLOR_BGR2HSV)
upper_yellow = np.array([70, 48, 255])
lower_yellow = np.array([50, 28, 245])
# Threshold the HSV image to get only yellow colors
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
m = cv2.moments(mask, False)
try:
cx, cy = m['m10']/m['m00'], m['m01']/m['m00']
except ZeroDivisionError:
cy, cx = height/2, width/2
error_x = cx - width / 2
speed_cmd = Twist()
speed_cmd.linear.x = 0.2
speed_cmd.angular.z = -error_x / 100
self.speed_pub.publish(speed_cmd)
def main():
rospy.init_node('line_following_node', anonymous=True)
line_follower_object = LineFollower()
try:
rospy.spin()
except KeyboardInterrupt:
print("Shutting down")
if __name__ == '__main__':
main()
but the issue is when i ever i give the command takeoff from the keyboard_controller the drone just takes off from the ground plane and keeps on moving upwards and never stops/hover in an particular altitude and lands if i give land commnad!! i thought that the issues is with the controller of the package, but i have tried various packages for the ardrone like
- Ardrone_autopilot- https://github.com/Barahlush/ardrone_autopilot.git - “roslaunch ardrone_autopilot autopilot.launch”
autopilot.launch
<launch>
<node name="interface" pkg="ardrone_autopilot" type="interface.py" output="screen">
<remap from="/in/image/" to="/ui/image/"/>
<param name="swap_red_blue" value="True" />
</node>
<node name="controller" pkg="ardrone_autopilot" type="controller" output="screen">
</node>
<node name="imgHandler" pkg="ardrone_autopilot" type="imgHandler" output="screen">
</node>
</launch>
- Ardrone_tutorials - https://github.com/mikehamer/ardrone_tutorials.git - “roslaunch ardrone_tutorials keyboard_controller.launch”
keyboard_controller.py
#!/usr/bin/env python
# The Keyboard Controller Node for the tutorial "Up and flying with the AR.Drone and ROS | Getting Started"
# https://github.com/mikehamer/ardrone_tutorials
# This controller extends the base DroneVideoDisplay class, adding a keypress handler to enable keyboard control of the drone
# Import the ROS libraries, and load the manifest file which through <depend package=... /> will give us access to the project dependencies
import roslib; roslib.load_manifest('ardrone_tutorials')
import rospy
# Load the DroneController class, which handles interactions with the drone, and the DroneVideoDisplay class, which handles video display
from drone_controller import BasicDroneController
from drone_video_display import DroneVideoDisplay
# Finally the GUI libraries
from PySide import QtCore, QtGui
# Here we define the keyboard map for our controller (note that python has no enums, so we use a class)
class KeyMapping(object):
PitchForward = QtCore.Qt.Key.Key_E
PitchBackward = QtCore.Qt.Key.Key_D
RollLeft = QtCore.Qt.Key.Key_S
RollRight = QtCore.Qt.Key.Key_F
YawLeft = QtCore.Qt.Key.Key_W
YawRight = QtCore.Qt.Key.Key_R
IncreaseAltitude = QtCore.Qt.Key.Key_Q
DecreaseAltitude = QtCore.Qt.Key.Key_A
Takeoff = QtCore.Qt.Key.Key_Y
Land = QtCore.Qt.Key.Key_H
Emergency = QtCore.Qt.Key.Key_Space
# Our controller definition, note that we extend the DroneVideoDisplay class
class KeyboardController(DroneVideoDisplay):
def __init__(self):
super(KeyboardController,self).__init__()
self.pitch = 0
self.roll = 0
self.yaw_velocity = 0
self.z_velocity = 0
# We add a keyboard handler to the DroneVideoDisplay to react to keypresses
def keyPressEvent(self, event):
key = event.key()
# If we have constructed the drone controller and the key is not generated from an auto-repeating key
if controller is not None and not event.isAutoRepeat():
# Handle the important cases first!
if key == KeyMapping.Emergency:
controller.SendEmergency()
elif key == KeyMapping.Takeoff:
controller.SendTakeoff()
elif key == KeyMapping.Land:
controller.SendLand()
else:
# Now we handle moving, notice that this section is the opposite (+=) of the keyrelease section
if key == KeyMapping.YawLeft:
self.yaw_velocity += 1
elif key == KeyMapping.YawRight:
self.yaw_velocity += -1
elif key == KeyMapping.PitchForward:
self.pitch += 1
elif key == KeyMapping.PitchBackward:
self.pitch += -1
elif key == KeyMapping.RollLeft:
self.roll += 1
elif key == KeyMapping.RollRight:
self.roll += -1
elif key == KeyMapping.IncreaseAltitude:
self.z_velocity += 1
elif key == KeyMapping.DecreaseAltitude:
self.z_velocity += -1
# finally we set the command to be sent. The controller handles sending this at regular intervals
controller.SetCommand(self.roll, self.pitch, self.yaw_velocity, self.z_velocity)
def keyReleaseEvent(self,event):
key = event.key()
# If we have constructed the drone controller and the key is not generated from an auto-repeating key
if controller is not None and not event.isAutoRepeat():
# Note that we don't handle the release of emergency/takeoff/landing keys here, there is no need.
# Now we handle moving, notice that this section is the opposite (-=) of the keypress section
if key == KeyMapping.YawLeft:
self.yaw_velocity -= 1
elif key == KeyMapping.YawRight:
self.yaw_velocity -= -1
elif key == KeyMapping.PitchForward:
self.pitch -= 1
elif key == KeyMapping.PitchBackward:
self.pitch -= -1
elif key == KeyMapping.RollLeft:
self.roll -= 1
elif key == KeyMapping.RollRight:
self.roll -= -1
elif key == KeyMapping.IncreaseAltitude:
self.z_velocity -= 1
elif key == KeyMapping.DecreaseAltitude:
self.z_velocity -= -1
# finally we set the command to be sent. The controller handles sending this at regular intervals
controller.SetCommand(self.roll, self.pitch, self.yaw_velocity, self.z_velocity)
# Setup the application
if __name__=='__main__':
import sys
# Firstly we setup a ros node, so that we can communicate with the other packages
rospy.init_node('ardrone_keyboard_controller')
# Now we construct our Qt Application and associated controllers and windows
app = QtGui.QApplication(sys.argv)
controller = BasicDroneController()
display = KeyboardController()
display.show()
# executes the QT application
status = app.exec_()
# and only progresses to here once the application has been shutdown
rospy.signal_shutdown('Great Flying!')
sys.exit(status)
keyboard_controller.launch
<launch>
<!-- Launches the AR.Drone driver -->
<node name="ardrone_driver" pkg="ardrone_autonomy" type="ardrone_driver" output="screen" clear_params="true">
<param name="outdoor" value="0" /> <!-- If we are flying outdoors, will select more aggressive default settings -->
<param name="flight_without_shell" value="0" /> <!-- Changes internal controller gains if we are flying without the propeller guard -->
<param name="altitude_max" value="3000" /> <!-- in millimeters = 3 meters = 9' -->
<param name="altitude_min" value="50" /> <!-- in millimeters = 5cm = 2" -->
<param name="euler_angle_max" value="0.1" /> <!-- maximum allowable body angle in radians = 5 degrees -->
<param name="control_vz_max" value="200" /> <!-- maximum z velocity in mm/sec = 0.2m/sec -->
<param name="control_yaw" value="0.7" /> <!-- maximum rotation rate in radians/sec = 40 degrees per second (1/9 rev/sec) -->
</node>
<!-- Launches the keyboard controller -->
<node name="keyboard_controller" pkg="ardrone_tutorials" type="keyboard_controller.py" required="true"/>
</launch>
sorry for the long question! please do suggest me with some solution for this!(Note iam working in my ROS Kinetic and gazebo 7 vesrion in my Ubuntu 16.04!)