
I couldn’t reply there and ask this because that post was closed. I would like to know how we knew that the general parameter map_update_interval is in the slam_gmapping package . We probably need to know that in order to pass the correct name! In that case it makes sense because that parameter has clearly a lot to do with the node that is going to create the map (slam_gmapping node) and give as an output the occupancy grid map. But in other cases how would I determine the correct name?
In the next excercice 2.12 I couldn’t know it , I couldn’t pass the correct name for the maxUrange parameter of the laser. That has to be one of packages of the laser. But which one?
I would love to have clue how to determine every parameter name: (general case)
Thank you !

Hi @mouidsakka01 ,
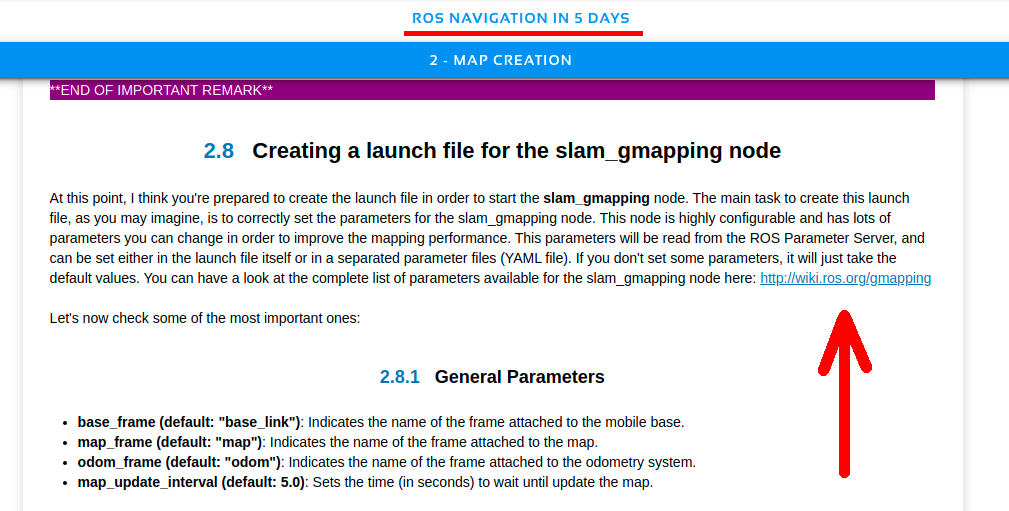
This is clearly mentioned in the course notes. It gives a link to the weblink that lists all the parameters.
Here: http://wiki.ros.org/gmapping
The answer for all these questions: again same as above. Clearly referenced in the course notes with the web link.
I just don’t understand how you seem to miss those. I would like to know how you learn.
Do you just execute the provided commands and purposefully not read the study material?
I seriously want to know how you study here!
Look ! It is right there in the notes!
Regards,
Girish
Hi @mouidsakka01 ,
There are actually four different ways (that I know of) to set the parameters:
-
Using the
paramline directly in the launch file outside the node:<include file="$(find ros_package_name)/path/to/launch_file.launch"/> <param name="/topic/paramter_name" type="data_type" value="value">This is only in the case where the launch file is loaded as an “include” in the current launch file where you want to change/set the parameter.
-
Using the
paramline within thenodeline in the launch file:<node pkg="package_name" type="file_to_run" name="node_name"> <param name="parameter_name" type="data_type" value="value"> </node>This is when you have the
nodelaunched in the same launch file as the one you want to set the parameter in. -
Using a
yamlfile:<node pkg="package_name" type="file_name" name="node_name"> <rosparam file="$(find ros_package_name)/path/to/yaml_config.yaml" command="load"/> </node>yaml_config.yamlfile contents:topic: parameter_name: value parameter_name: value parameter_name: valueThis is, again, in the launch file that you are launching the node.
-
Using dynamic reconfigure method:
rosrun rqt_reconfigure rqt_reconfigureYou can use this method only when the nodes are started and running, that is, during run-time, and not before starting the nodes. This is a “post-launch” method.The above 3 methods are “pre-launch” methods.
Hope this helps you understand better!
Regards,
Girish
1 Like