#! /usr/bin/env python
"""
Greedy Best-First Search path planning algorithm exercise
Author: Roberto Zegers R.
Copyright: Copyright (c) 2020, Roberto Zegers R.
License: BSD-3-Clause
Date: Nov 30, 2020
Usage: roslaunch unit3 unit3_gbfs_exercise.launch
"""
import rospy
from math import sqrt
def manhattan_distance(a, b):
return (abs(a[0] - b[0]) + abs(a[1] - b[1]))
def euclidean_distance(a, b):
# implement the body of this function
return sqrt((a[0]-b[0])**2+(a[1]-b[1])**2)
def find_neighbors(index, width, height, costmap, orthogonal_step_cost):
"""
Identifies neighbor nodes inspecting the 8 adjacent neighbors
Checks if neighbor is inside the map boundaries and if is not an obstacle according to a threshold
Returns a list with valid neighbour nodes as [index, step_cost] pairs
"""
neighbors = []
# length of diagonal = length of one side by the square root of 2 (1.41421)
diagonal_step_cost = orthogonal_step_cost * 1.41421
# threshold value used to reject neighbor nodes as they are considered as obstacles [1-254]
lethal_cost = 1
upper = index - width
if upper > 0:
if costmap[upper] < lethal_cost:
step_cost = orthogonal_step_cost + costmap[upper]/255
neighbors.append([upper, step_cost])
left = index - 1
if left % width > 0:
if costmap[left] < lethal_cost:
step_cost = orthogonal_step_cost + costmap[left]/255
neighbors.append([left, step_cost])
upper_left = index - width - 1
if upper_left > 0 and upper_left % width > 0:
if costmap[upper_left] < lethal_cost:
step_cost = diagonal_step_cost + costmap[upper_left]/255
neighbors.append([index - width - 1, step_cost])
upper_right = index - width + 1
if upper_right > 0 and (upper_right) % width != (width - 1):
if costmap[upper_right] < lethal_cost:
step_cost = diagonal_step_cost + costmap[upper_right]/255
neighbors.append([upper_right, step_cost])
right = index + 1
if right % width != (width + 1):
if costmap[right] < lethal_cost:
step_cost = orthogonal_step_cost + costmap[right]/255
neighbors.append([right, step_cost])
lower_left = index + width - 1
if lower_left < height * width and lower_left % width != 0:
if costmap[lower_left] < lethal_cost:
step_cost = diagonal_step_cost + costmap[lower_left]/255
neighbors.append([lower_left, step_cost])
lower = index + width
if lower <= height * width:
if costmap[lower] < lethal_cost:
step_cost = orthogonal_step_cost + costmap[lower]/255
neighbors.append([lower, step_cost])
lower_right = index + width + 1
if (lower_right) <= height * width and lower_right % width != (width - 1):
if costmap[lower_right] < lethal_cost:
step_cost = diagonal_step_cost + costmap[lower_right]/255
neighbors.append([lower_right, step_cost])
return neighbors
def indexToWorld(flatmap_index, map_width, map_resolution, map_origin = [0,0]):
"""
Converts a flatmap index value to world coordinates (meters)
flatmap_index: a linear index value, specifying a cell/pixel in an 1-D array
map_width: number of columns in the occupancy grid
map_resolution: side lenght of each grid map cell in meters
map_origin: the x,y position in grid cell coordinates of the world's coordinate origin
Returns a list containing x,y coordinates in the world frame of reference
"""
# convert to x,y grid cell/pixel coordinates
grid_cell_map_x = flatmap_index % map_width
grid_cell_map_y = flatmap_index // map_width
# convert to world coordinates
x = map_resolution * grid_cell_map_x + map_origin[0]
y = map_resolution * grid_cell_map_y + map_origin[1]
return [x,y]
def greedy_bfs(start_index, goal_index, width, height, costmap, resolution, origin, grid_viz = None):
'''
Performs Greedy Best-First Search on a costmap with a given start and goal node
'''
# create an open_list
open_list = []
# set to hold already processed nodes
closed_list = set()
# dict for mapping children to parent
parents = dict()
# dict for mapping h costs (heuristic costs) to nodes
h_costs = dict()
# determine the h cost (heuristic cost) for the start node
from_xy = indexToWorld(start_index, width, resolution, origin)
to_xy = indexToWorld(goal_index, width, resolution, origin)
h_cost = euclidean_distance(from_xy, to_xy)
rospy.loginfo(h_cost)
# set the start's node h_cost
h_costs[start_index] = h_cost
# add start node to open list
open_list.append([start_index, h_cost])
shortest_path = []
path_found = False
rospy.loginfo('Greedy BFS: Done with initialization')
# Main loop, executes as long as there are still nodes inside open_list
while open_list:
# sort open_list according to the lowest 'g_cost' value (second element of each sublist)
open_list.sort(key = lambda x: x[1])
# extract the first element (the one with the lowest 'g_cost' value)
current_node = open_list.pop(0)[0]
# Close current_node to prevent from visting it again
closed_list.add(current_node)
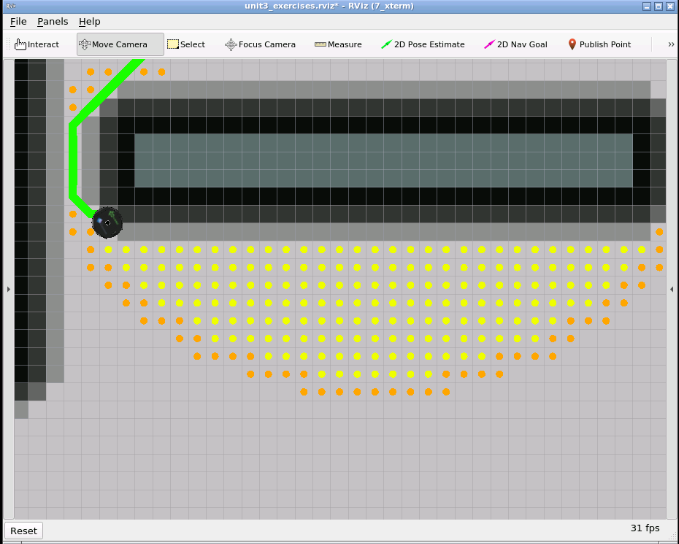
# Optional: visualize closed nodes
grid_viz.set_color(current_node,"pale yellow")
# If current_node is the goal, exit the main loop
if current_node == goal_index:
path_found = True
break
# Get neighbors of current_node
neighbors = find_neighbors(current_node, width, height, costmap, resolution)
# Loop neighbors
for neighbor_index, step_cost in neighbors:
# Check if the neighbor has already been visited
if neighbor_index in closed_list:
continue
# pure heuristic 'h_cost'
from_xy = indexToWorld(neighbor_index, width, resolution, origin)
to_xy = indexToWorld(goal_index, width, resolution, origin)
h_cost = euclidean_distance(from_xy, to_xy)
#h_cost = manhattan_distance(from_xy, to_xy)
# print("h_cost=",h_cost)
rospy.loginfo(h_cost)
# Check if the neighbor is in open_list
in_open_list = False
for idx, element in enumerate(open_list):
if element[0] == neighbor_index:
in_open_list = True
break
# CASE 1: neighbor already in open_list
if in_open_list:
if h_cost < h_costs[neighbor_index]:
# Update the node's heuristic cost
h_costs[neighbor_index] = h_cost
parents[neighbor_index] = current_node
# Update the node's h_cost inside open_list
open_list[idx] = [neighbor_index, h_cost]
# CASE 2: neighbor not in open_list
else:
# Set the node's heuristic cost
h_costs[neighbor_index] = h_cost
parents[neighbor_index] = current_node
# Add neighbor to open_list
open_list.append([neighbor_index, h_cost])
# Optional: visualize frontier
grid_viz.set_color(neighbor_index,'orange')
rospy.loginfo('Greedy BFS: Done traversing nodes in open_list')
if not path_found:
rospy.logwarn('Greedy BFS: No path found!')
return shortest_path
# Reconstruct path by working backwards from target
if path_found:
node = goal_index
shortest_path.append(goal_index)
while node != start_index:
shortest_path.append(node)
# get next node
node = parents[node]
# reverse list
shortest_path = shortest_path[::-1]
rospy.loginfo('Greedy BFS: Done reconstructing path')
return shortest_path