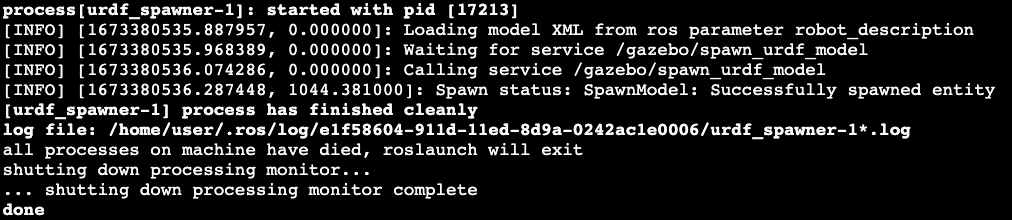
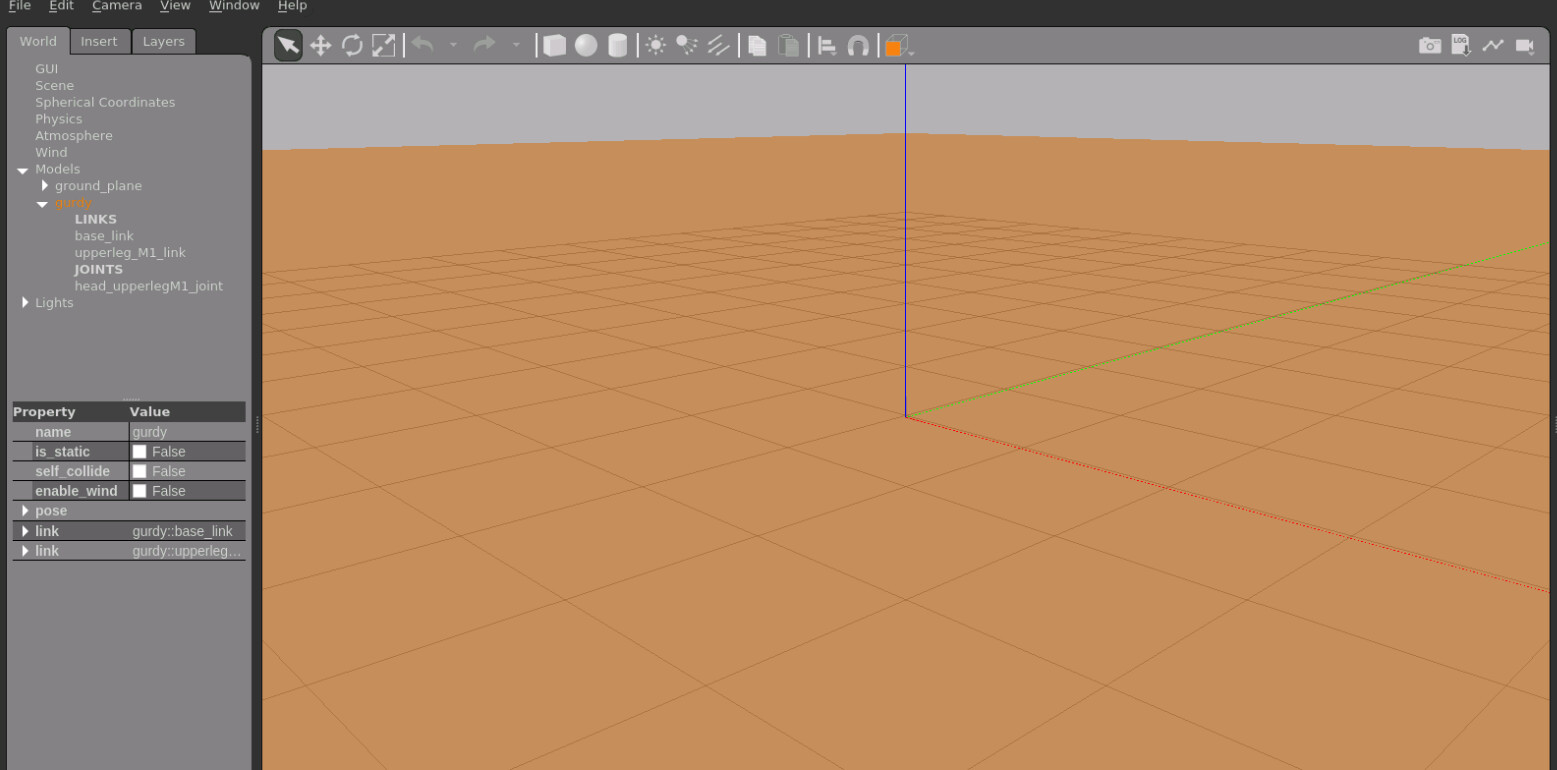
I am currently on URDF course unit 3. The Gurdy 3D model has been successfully shown in RVIZ but failed to spawn to Gazebo. There is no error and I can see the links and joints at the structure tree on the left-hand side of the Gazebo but nothing is shown in the simulation even though I have turned on the ‘collisions’, ‘inertias’, and ‘link frames’ in view.
gurdy.urdf
<?xml version = "1.0"?>
<robot name = "gurdy">
<material name="red">
<color rgba="0.8 0 0 1"/>
</material>
<material name="green">
<color rgba="0 0.8 0 1"/>
</material>
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="grey">
<color rgba="0.8 0.8 0.8 1"/>
</material>
<!-- LINKS -->
<link name = "base_link">
</link>
<link name = "head_link">
<inertial>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<mass value = "0.01"/>
<intertia ixx = "7.5833e-6" iyy = "7.5833e-6" izz = "1.25e-5"/>
</inertial>
<collision>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<cylinder radius = "0.05" length = "0.04"/>
</geometry>
</collision>
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_head_v2.dae"/>
</geometry>
<material name="red"/>
</visual>
</link>
<gazebo reference = "head_link">
<kp>1000.0</kp>
<kd>1000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Red</material>
</gazebo>
<link name = "upperleg_M1_link">
<inertial>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<mass value = "0.01"/>
<intertia ixx = "9.005208e-6" iyy = "9.005208e-6" izz = "1.8e-5"/>
</inertial>
<collision>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<cylinder radius = "0.06" length = "0.0025"/>
</geometry>
</collision>
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_higherleg_v2.dae"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference = "upperleg_M1_link">
<kp>1000.0</kp>
<kd>1000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Green</material>
</gazebo>
<link name = "lowerleg_M1_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_lowerleg_v2.dae"/>
</geometry>
</visual>
</link>
<link name = "footM1_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<sphere radius = "0.008"/>
</geometry>
</visual>
</link>
<link name = "upperleg_M2_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_higherleg_v2.dae"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<link name = "lowerleg_M2_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_lowerleg_v2.dae"/>
</geometry>
</visual>
</link>
<link name = "footM2_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<sphere radius = "0.008"/>
</geometry>
</visual>
</link>
<link name = "upperleg_M3_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_higherleg_v2.dae"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<link name = "lowerleg_M3_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<mesh filename = "package://my_gurdy_description/models/gurdy/meshes/gurdy_lowerleg_v2.dae"/>
</geometry>
</visual>
</link>
<link name = "footM3_link">
<visual>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<geometry>
<sphere radius = "0.008"/>
</geometry>
</visual>
</link>
<!-- JOINTS -->
<joint name = "fixed" type = "fixed">
<parent link = "base_link"/>
<child link = "head_link"/>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<limit effort = "1.0" velocity = "0.005"/>
</joint>
<joint name = "head_upperlegM1_joint" type = "revolute">
<parent link = "head_link"/>
<child link = "upperleg_M1_link"/>
<origin xyz = "-0.02165 -0.0125 -0.008" rpy = "3.14159 0 0.0523599"/>
<limit lower = "-0.2" upper = "0.2" effort = "1.0" velocity = "0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<joint name = "upperlegM1_lowerlegM1_joint" type = "revolute">
<parent link = "upperleg_M1_link"/>
<child link = "lowerleg_M1_link"/>
<origin xyz = "0 0.0095 0.06" rpy = "0 -0.3 3.14159"/>
<limit lower = "-0.2" upper = "0.2" effort = "1.0" velocity = "0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<joint name = "basefoot_peg_M1_joint" type = "fixed">
<parent link = "lowerleg_M1_link"/>
<child link = "footM1_link"/>
<origin xyz = "0 0 0.06" rpy = "0 0 0"/>
<limit effort = "1.0" velocity = "0.005"/>
</joint>
<joint name = "head_upperlegM2_joint" type = "revolute">
<parent link = "head_link"/>
<child link = "upperleg_M2_link"/>
<origin xyz = "0.02165 -0.0125 -0.008" rpy = "3.14159 0 2.61799"/>
<limit lower = "-0.2" upper = "0.2" effort = "1.0" velocity = "0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<joint name = "upperlegM2_lowerlegM2_joint" type = "revolute">
<parent link = "upperleg_M2_link"/>
<child link = "lowerleg_M2_link"/>
<origin xyz = "0 0.0095 0.06" rpy = "0 -0.3 3.14159"/>
<limit lower = "-0.2" upper = "0.2" effort = "1.0" velocity = "0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<joint name = "basefoot_peg_M2_joint" type = "fixed">
<parent link = "lowerleg_M2_link"/>
<child link = "footM2_link"/>
<origin xyz = "0 0 0.06" rpy = "0 0 0"/>
<limit effort = "1.0" velocity = "0.005"/>
</joint>
<joint name = "head_upperlegM3_joint" type = "revolute">
<parent link = "head_link"/>
<child link = "upperleg_M3_link"/>
<origin xyz = "0 0.025 -0.008" rpy = "3.14159 0 -1.5708"/>
<limit lower = "-0.2" upper = "0.2" effort = "1.0" velocity = "0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<joint name = "upperlegM3_lowerlegM3_joint" type = "revolute">
<parent link = "upperleg_M3_link"/>
<child link = "lowerleg_M3_link"/>
<origin xyz = "0 0.0095 0.06" rpy = "0 -0.3 3.14159"/>
<limit lower = "-0.2" upper = "0.2" effort = "1.0" velocity = "0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<joint name = "basefoot_peg_M3_joint" type = "fixed">
<parent link = "lowerleg_M3_link"/>
<child link = "footM3_link"/>
<origin xyz = "0 0 0.06" rpy = "0 0 0"/>
<limit effort = "1.0" velocity = "0.005"/>
</joint>
</robot>
spawn_urdf.launch
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="x" default="0.0" />
<arg name="y" default="0.0" />
<arg name="z" default="0.0" />
<arg name="urdf_robot_file" default="" />
<arg name="robot_name" default="" />
<param name="robot_description" command="cat $(arg urdf_robot_file)" />
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -x $(arg x) -y $(arg y) -z $(arg z) -model $(arg robot_name) -param robot_description"/>
</launch>
spawn_gurdy.launch
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<include file="$(find my_gurdy_description)/launch/spawn_urdf.launch">
<arg name="x" value="0.0" />
<arg name="y" value="0.0" />
<arg name="z" value="0.2" />
<arg name="urdf_robot_file" value="$(find my_gurdy_description)/urdf/gurdy.urdf"/>
<arg name="robot_name" value="gurdy" />
</include>
</launch>