Hi everyone,
I was doing the lesson 3 of URDF course. I already pass the quiz and I’m doing the extra exercises with the Gurdy robot adding to it the prismatic, arm on the head, etc.
However, this error shows up:
Controller Spawner couldn’t find the expected controller_manager ROS interface.
The launch files are fine, the YAML file describes all the controllers and the URDF file has the Gazebo tag to load the controllers.
The funny thing is the previous version of the Gurdy robot works very well. But this second version does not.
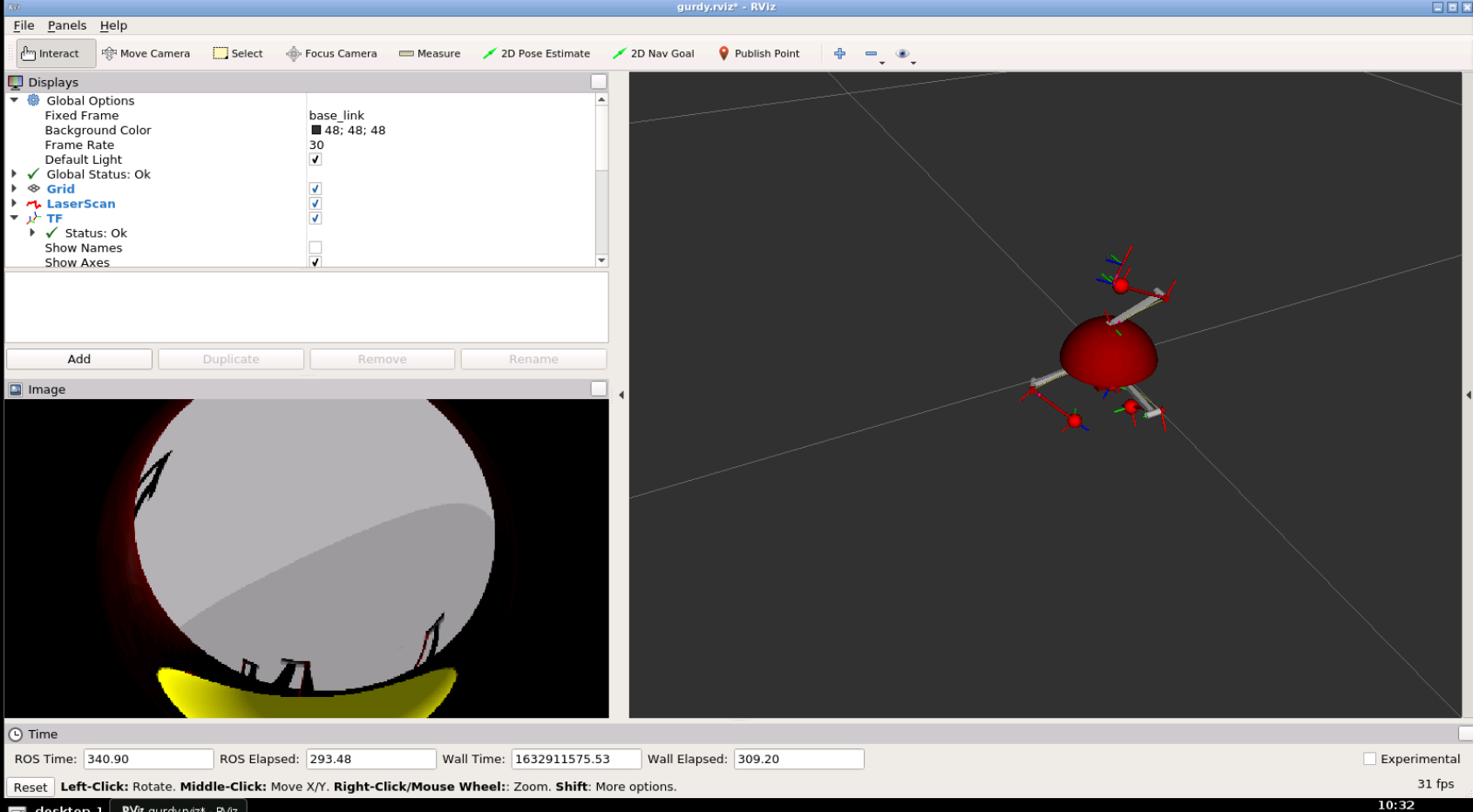
This image is a screenshot of my interface:

In this image, at the upper left corner, sometimes appears a Gazebo model. But starting from a fresh session the results are the same.
Any ideas? advice?
thanks for your time.