Hello All,
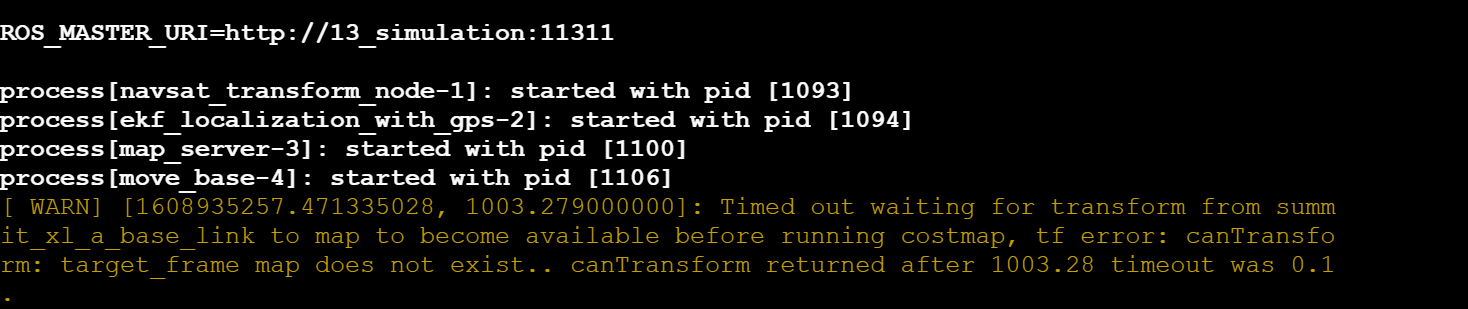
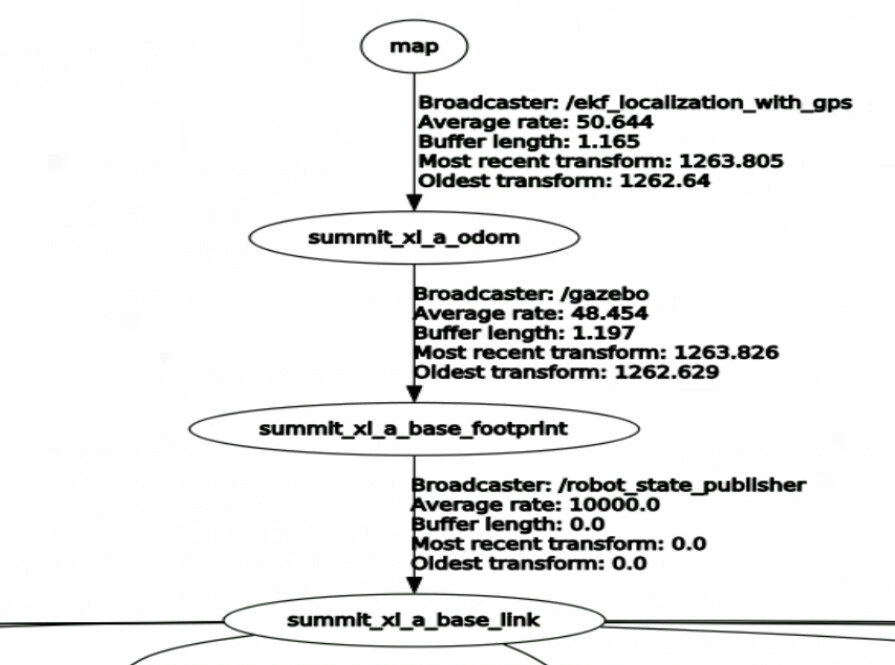
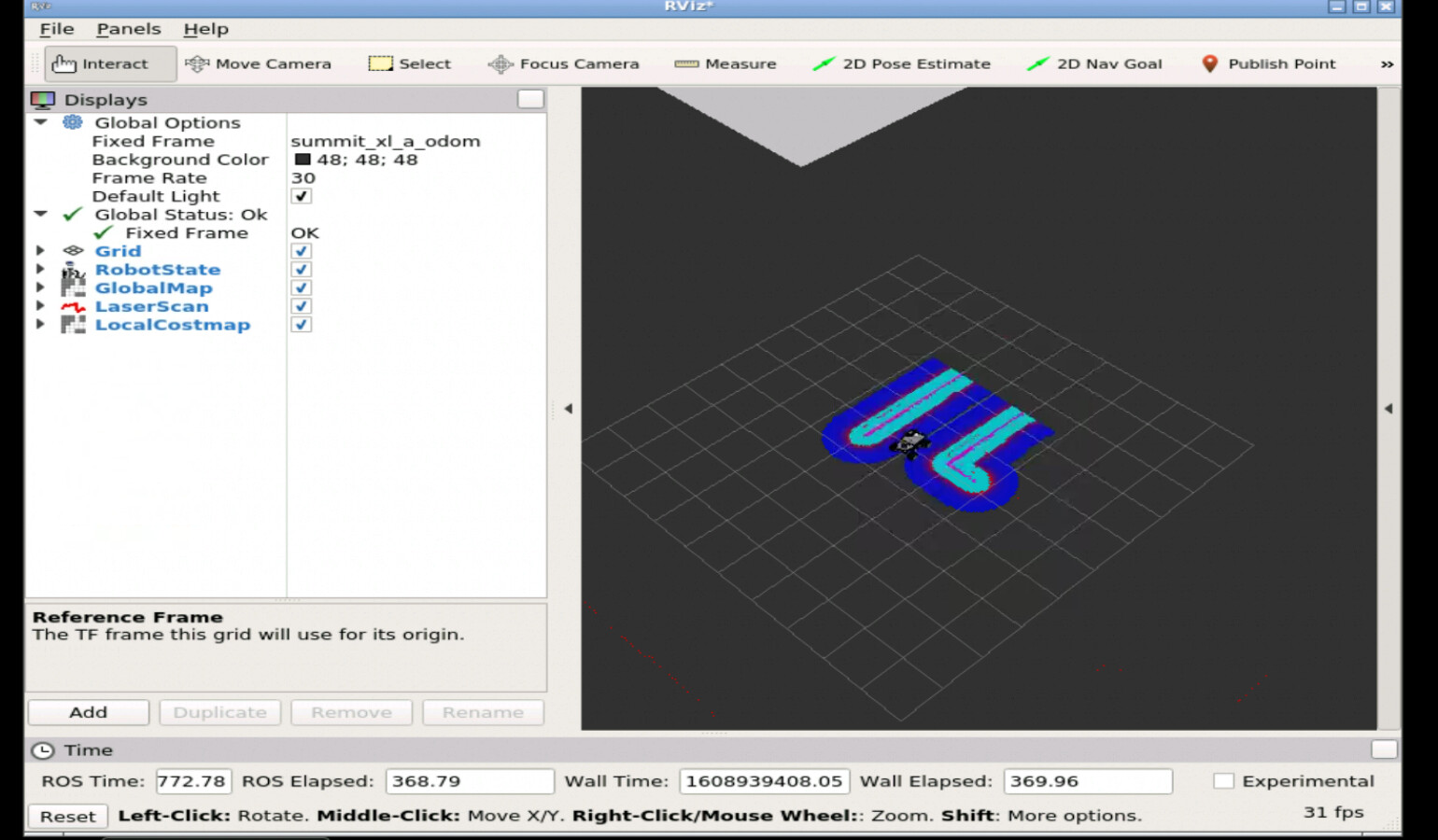
In the GPS navigation unit, I am able to have empty map and /odometry/gps topic done. But when I try to do the navigation with the Nav Goal button inside the Rviz, the robot is not able to get to the goal location and just keep spinning at its starting position. The command prompt tells me that the transform construction between map and base_link is time out, but the tf tree graph looks fine to me. Appreciate anyone who could help me out! Thanks.