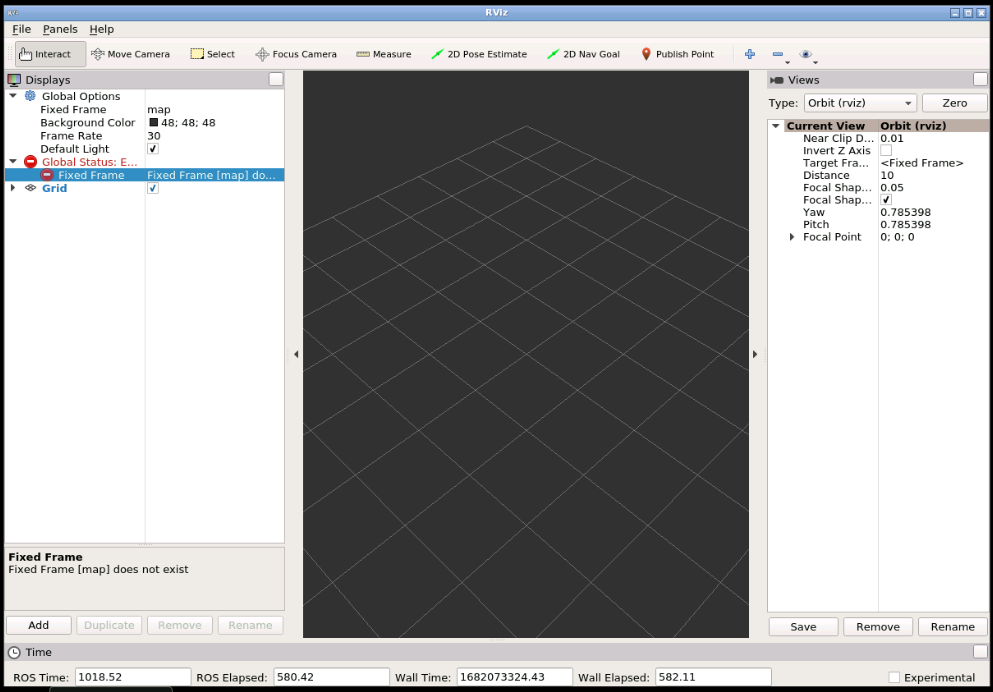
I am learning the course Basic Kinematics of Mobile Robots. In Chapter 3: Kinematics of Nonholonomic robots, I got the error “Fixed Frame [map] does not exist” when using RVIZ. The source code and error video are attached. [source_code, video] Please provide help if you may fix it. Thank you very much!