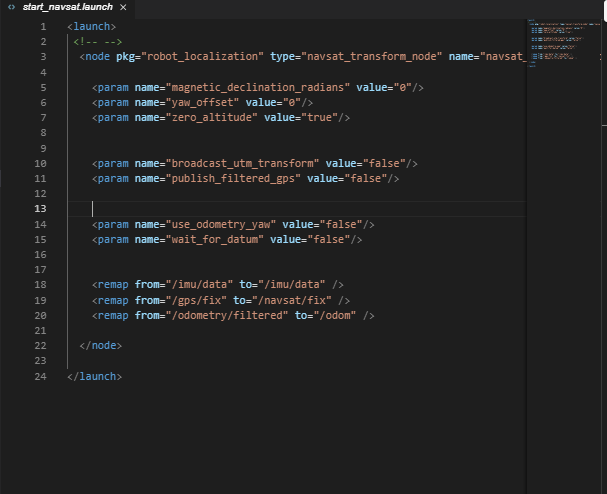
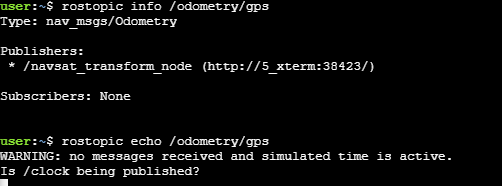
Hi, I dont understand whats going on here. I copied your code for navsat, and it is described it should publish to the topic: /odometry/gps. However, this is not happening. Pictures for reference:
Also, my simulation has a large offset from where it think it is, to where it actually is. So I think the gps is not configured proberly. Is this related?
best
Hello @badmadafaka ,
You need to remove or comment the last remap of the launch file:
<!--<remap from="/odometry/filtered" to="/odometry/filtered" />-->
Best,
2 Likes
Hi, thanks, this didnt seem to solve my offset problem. Can you helpt with that too?
When i look at rviz, and move navigate the robot, it seems the objects its scanning is moving away from the robot more than the robot is moving on the rviz map.
Hello @badmadafaka ,
Could you share here some images/videos of these issues? In my tests everything seems to be working ok.
Here is a gif where you can see that its not just the robot moving on the map, its also the items that are moving away. And location is off.
Hello @badmadafaka ,
I’ve been looking into this issue but couldn’t find a proper solution yet. Unfortunately, this course has become a little bit deprecated at this moment. I’ll keep looking into it and let you know as soon as I have a solution. Are you specifically interested in the outdoor navigation subject? Or the Jackal robot? Maybe I can suggest other courses to check in the meantime.
Sorry for the inconveniences,
Yes, I am interested in outdoor navigation using gps IMU and odometry data. Preferably husky robot. I have been watching this tuturial,: https://www.youtube.com/watch?v=cmOplaq8cHc but the same issue happens to me
And without making a map first.
I’ve been doing some tests with the Summit XL course Unit (Learn Robotics from Zero - Robotics & ROS Online Courses) and it seems to be working OK. There are some issues when going through doors, but they can be fixed by tunning the inflation_radius. I’ve sent to your e-mail the package I’ve created for testing.