In this exercise we are trying to proof that the global cost map doesnt update when a new obstacle is added to the simulation because its only based in the static map. But in my rviz global costmap representation, the blue box (obstacle added) is visible and its saved in the global map.
Im doing something wrong? Why is his happening?
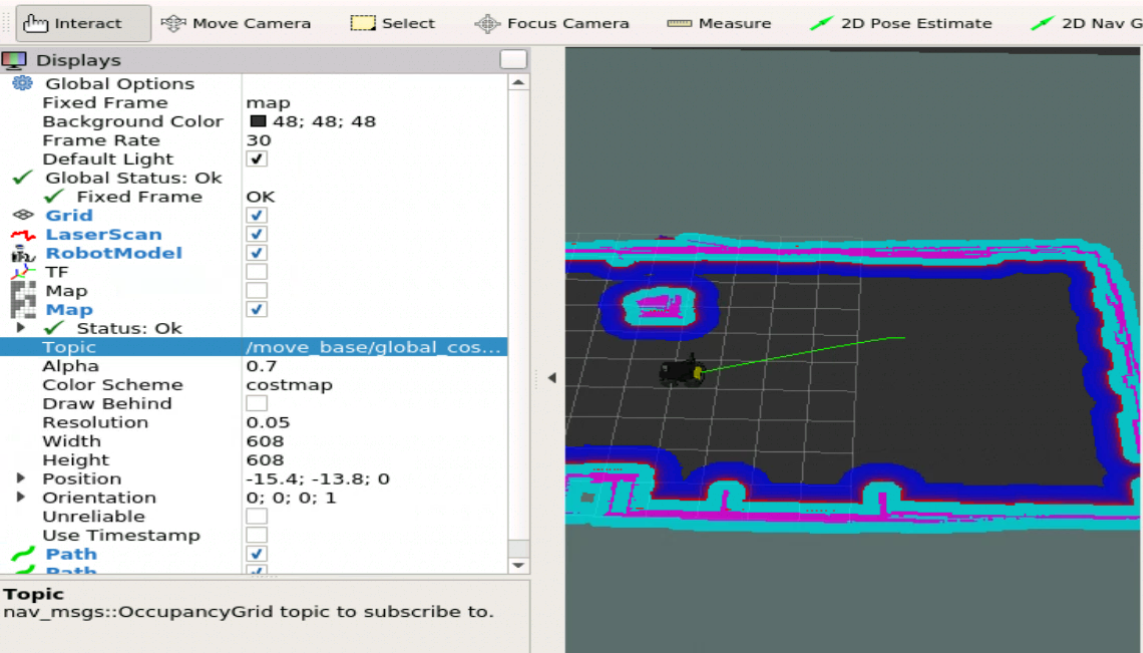
In the next image it can be seen that im visualizing the global cost map and how the object is detected.