In exercise 3.5, I am getting this ERROR: Apparently trajectory initialization failed, what should I do?
for RViz environment roslaunch fetch_moveit_config fetch_planning_execution.launch
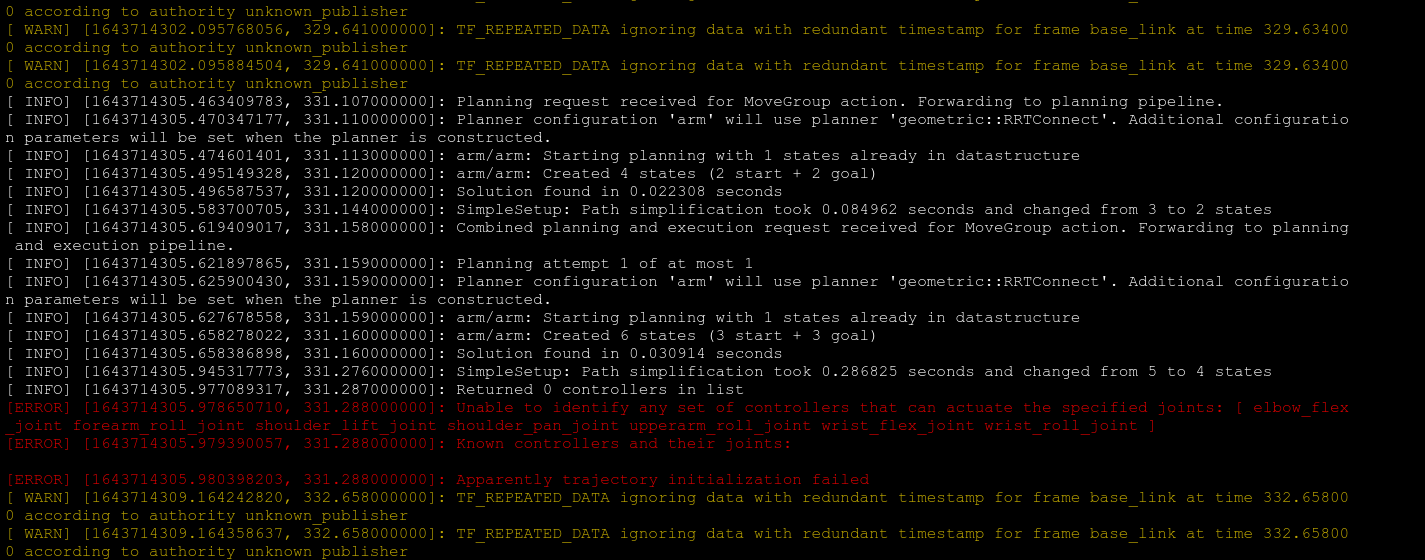
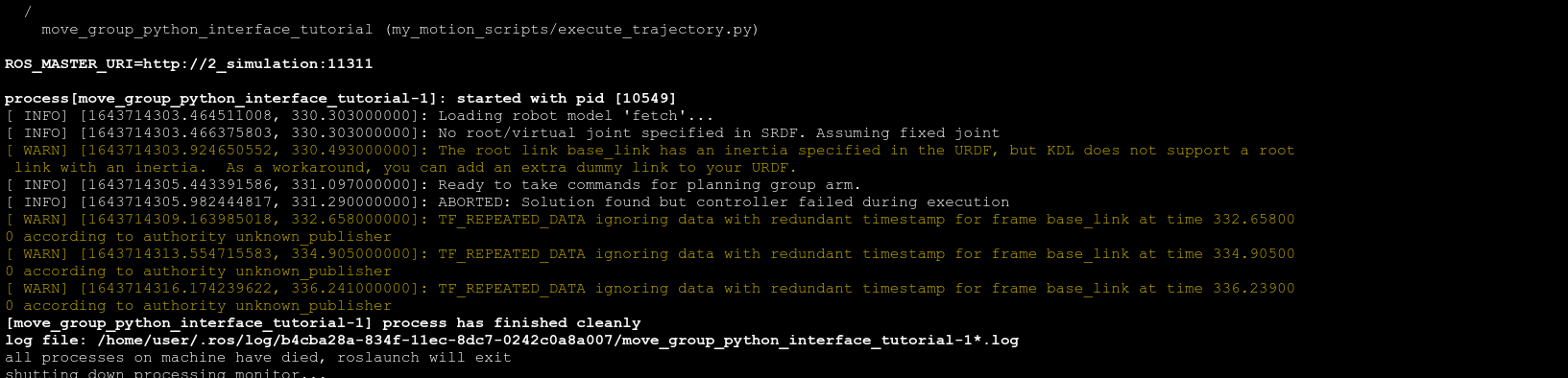
and got this for execute_trajectory.py
In exercise 3.5, I am getting this ERROR: Apparently trajectory initialization failed, what should I do?
for RViz environment roslaunch fetch_moveit_config fetch_planning_execution.launch
and got this for execute_trajectory.py
Hello @engineeredman ,
It looks like there’s an error in your arm controller configuration. Check the controller configuration (probably it’ll be a file named ros_controllers.yaml or controllers.yaml) and make sure that it corresponds with the controller provided in the simulation as explained in the course.