Launch Code:
<launch>
<node pkg = "unit_3_services"
type = "call_bb8_move_custom_service_server.py"
name = "bb8_move_custom_service_client"
output ="screen" />
</launch>
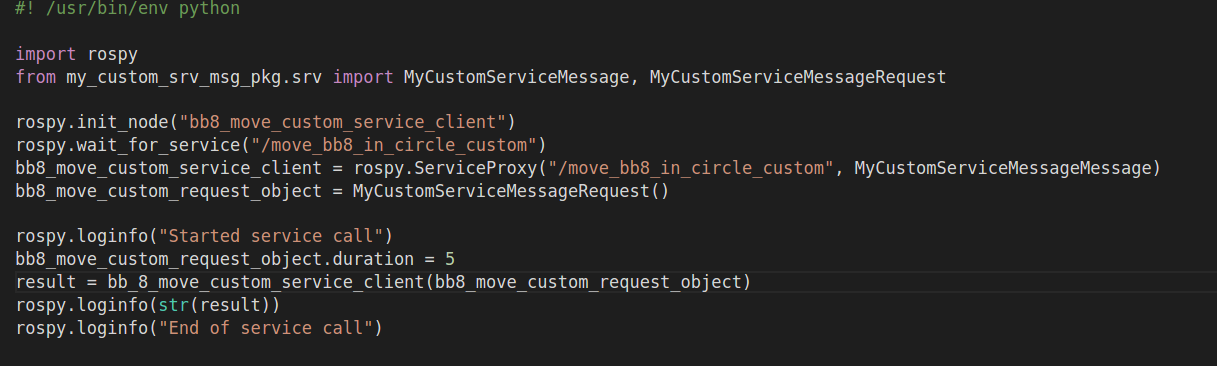
I have used the correct code but my robot does not move.
Can you share your Terminal output when launching the launch file?
Look at line 5, you have written MyCustomServiceMessageMessage, is that correct?
Yes, it is. This custom service message has the duration for movement. “int32 duration”
I have corrected the error. I made a naming error and wrote it as bb_8 instead of bb8. The error didn’t show yesterday but it did today so I made the required changes.
2 Likes