Hello,
I have a problem with localization of the robot in the exercise 3.3.
First of all, I mapped out the given environment by moving the robot and the map was successfully saved.
But when i tried to do localization of the robot by moving it in the rviz, I get this error below.
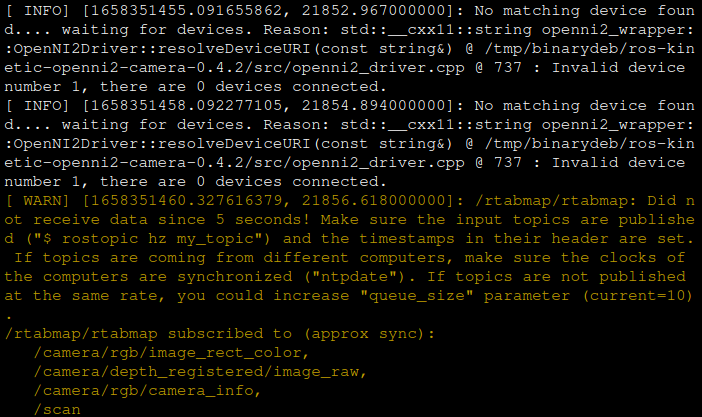
In the rviz, I also have an error on the Message under Map displays(Map/Status/Message). The error says as “No map received.”
I am trying to do autonomous navigation at the end and I am stuck on the localization part. How can I fix this error?
Thank you.