Trying to do the basic wall following robot as part of a course and running into this error:
launch.substitutions.substitution_failure.SubstitutionFailure: executable 'follow_wall' not found on the libexec directory '/home/user/ros2_ws/install/wall_follower/lib/wall_follower'
when I try to run:
ros2 launch wall_follower start_wall_following.launch.py
My file structure looks like this:
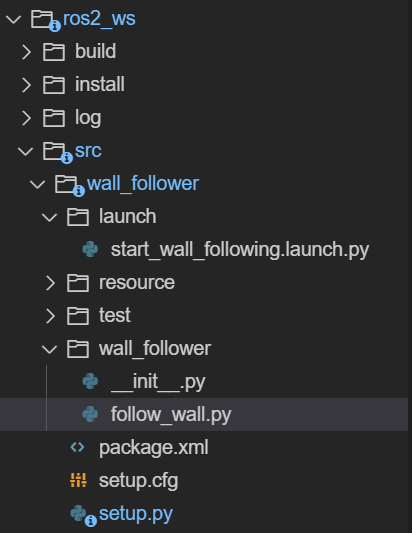
The 3 files, shown below:
follow_wall
import rclpy
# import the ROS2 python libraries
from rclpy.node import Node
# import the Twist module from geometry_msgs interface
from geometry_msgs.msg import Twist
# import the LaserScan module from sensor_msgs interface
from sensor_msgs.msg import LaserScan
from rclpy.qos import ReliabilityPolicy, QoSProfile
class WallFollow(Node):
def __init__(self):
# Here you have the class constructor
# call the class constructor
super().__init__('follow_wall')
# create the publisher object
self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)
# create the subscriber object
self.subscriber = self.create_subscription(
LaserScan, '/scan', self.laser_callback, QoSProfile(depth=10, reliability=ReliabilityPolicy.BEST_EFFORT))
# define the timer period for 0.5 seconds
self.timer_period = 0.5
# define the variable to save the received info
self.laser_forward = 0
self.laser_right = 0
# create a Twist message
self.cmd = Twist()
self.timer = self.create_timer(self.timer_period, self.motion)
def laser_callback(self, msg):
# Save the laser info
self.laser_forward = msg.ranges[359]
self.laser_right = msg.ranges[90]
def motion(self):
# print the data
self.get_logger().info('I receive: "%s"' % str(self.laser_forward))
# Logic of move
if self.laser_right > 0.3:
self.cmd.linear.x = 0.5
self.cmd.angular.z = -0.2
elif self.laser_right < 0.2:
self.cmd.linear.x = 0.5
self.cmd.angular.z = 0.2
else:
self.cmd.linear.x = 0.5
self.cmd.angular.z = 0.0
if self.laser_forward < 0.5:
self.cmd.angular.z = 0.5
# Publishing the cmd_vel values to a Topic
self.publisher_.publish(self.cmd)
def main(args=None):
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
follow_wall = WallFollow()
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin(follow_wall)
# Explicity destroy the node
follow_wall.destroy_node()
# shutdown the ROS communication
rclpy.shutdown()
if __name__ == '__main__':
main()
setup.py
from setuptools import setup
import os
from glob import glob
package_name = 'wall_follower'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name), glob('launch/*.launch.py'))
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='somebody very awesome',
maintainer_email='user@user.com',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'simple_subscriber = wall_follower.follow_wall:main'
],
},
)
wall_follower start_wall_following.launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='wall_follower',
executable='follow_wall',
output='screen'),
])
EDIT
ok one mistake I found was that this line in setup.py:
entry_points={
'console_scripts': [
'simple_subscriber = wall_follower.follow_wall:main'
],
},
should not say simple subscriber but instead wall_follower. Fixing that did bring progress and now a new error has arisen (full output of attempted launch):
INFO] [launch]: All log files can be found below /home/user/.ros/log/2023-01-01-21-08-08-165490-2_xterm-22022
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [follow_wall-1]: process started with pid [22084]
[follow_wall-1] Traceback (most recent call last):
[follow_wall-1] File "/home/user/ros2_ws/install/wall_follower/lib/wall_follower/follow_wall", line 33, in <module>
[follow_wall-1] sys.exit(load_entry_point('wall-follower==0.0.0', 'console_scripts', 'follow_wall')())
[follow_wall-1] File "/home/user/ros2_ws/install/wall_follower/lib/python3.8/site-packages/wall_follower/follow_wall.py", line 61, in main
[follow_wall-1] follow_wall = WallFollow()
[follow_wall-1] File "/home/user/ros2_ws/install/wall_follower/lib/python3.8/site-packages/wall_follower/follow_wall.py", line 18, in __init__
[follow_wall-1] self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)
[follow_wall-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rclpy/node.py", line 1140, in create_publisher
[follow_wall-1] check_for_type_support(msg_type)
[follow_wall-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rclpy/type_support.py", line 20, in check_for_type_support
[follow_wall-1] ts = msg_type.__class__._TYPE_SUPPORT
[follow_wall-1] AttributeError: type object 'type' has no attribute '_TYPE_SUPPORT' This might be a ROS 1 message type but it should be a ROS 2 message type. Make sure to source your ROS 2 workspace after your ROS 1 workspace.
[ERROR] [follow_wall-1]: process has died [pid 22084, exit code 1, cmd '/home/user/ros2_ws/install/wall_follower/lib/wall_follower/follow_wall --ros-args'].
I also often get this warning when trying to source:
OS_DISTRO was set to 'noetic' before. Please make sure that the environment does not mix paths from different distributions.
I noticed there are different types of source commands, not sure which to use. I also noticed there was ros 1 and ros 2 ways of launching, and different sourcing for each, Very lost here on which to use, or generally how to get my code to run.