i am keep getting this error what does it means ?
Hi @80601 ,
From the error output, I think you have not initialized your node with a name.
It says you are missing the rospy.init_node(<your_node_name>) line in your program.
Check if you have included that line and let me know if your problem is fixed.
Regards,
Girish
the node is already included
python file contain the service
#! /usr/bin/env python
import rospy
from std_srvs.srv import Empty,EmptyResponse
from bb8_move_circle_class import MoveBB8
def my_callback(request):
rospy.loginfo("The Service move_bb8_in_circle has been called")
movebb8_object = MoveBB8()
movebb8_object.move_bb8()
rospy.loginfo("Finished service move_bb8_in_circle")
return EmptyResponse()
rospy.init_node('service_move_bb8_in_circle_server')
my_service = rospy.Service('/move_bb8_in_circle', Empty , my_callback)
rospy.loginfo("Service /move_bb8_in_circle Ready")
rospy.spin() # keep the service open.
python class file
#! /usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
class MoveBB8():
def __init__(self):
self.bb8_vel_publisher = rospy.Publisher('/cmd_vel', Twist, queue_size=1)
self.cmd = Twist()
self.ctrl_c = False
self.rate = rospy.Rate(10) # 10hz
rospy.on_shutdown(self.shutdownhook)
def publish_once_in_cmd_vel(self):
while not self.ctrl_c:
connections = self.bb8_vel_publisher.get_num_connections()
if connections > 0:
self.bb8_vel_publisher.publish(self.cmd)
rospy.loginfo("Cmd Published")
break
else:
self.rate.sleep()
def shutdownhook(self):
# works better than the rospy.is_shutdown()
self.ctrl_c = True
def move_bb8(self, linear_speed=0.2, angular_speed=0.2):
self.cmd.linear.x = linear_speed
self.cmd.angular.z = angular_speed
rospy.loginfo("Moving BB8!")
self.publish_once_in_cmd_vel()
if __name__ == '__main__':
rospy.init_node('move_bb8_test', anonymous=True)
movebb8_object = MoveBB8()
try:
movebb8_object.move_bb8()
except rospy.ROSInterruptException:
pass
rospy.spin()
launch file
<launch>
<!-- Start Service Server for move_bb8_in_circle service -->
<node pkg="my_python_class" type="bb8_move_circle_service_server.py" name="service_move_bb8_in_circle_server" output="screen">
</node>
</launch>
Hi @80601 ,
I think I found your problem, it is in your python class file containing class MoveBB8().
if __name__ == '__main__':
rospy.init_node('move_bb8_test', anonymous=True)
movebb8_object = MoveBB8()
try:
movebb8_object.move_bb8()
except rospy.ROSInterruptException:
pass
rospy.spin() # this line must be written here
# rospy.spin() # delete this line
I believe that should fix your problem.
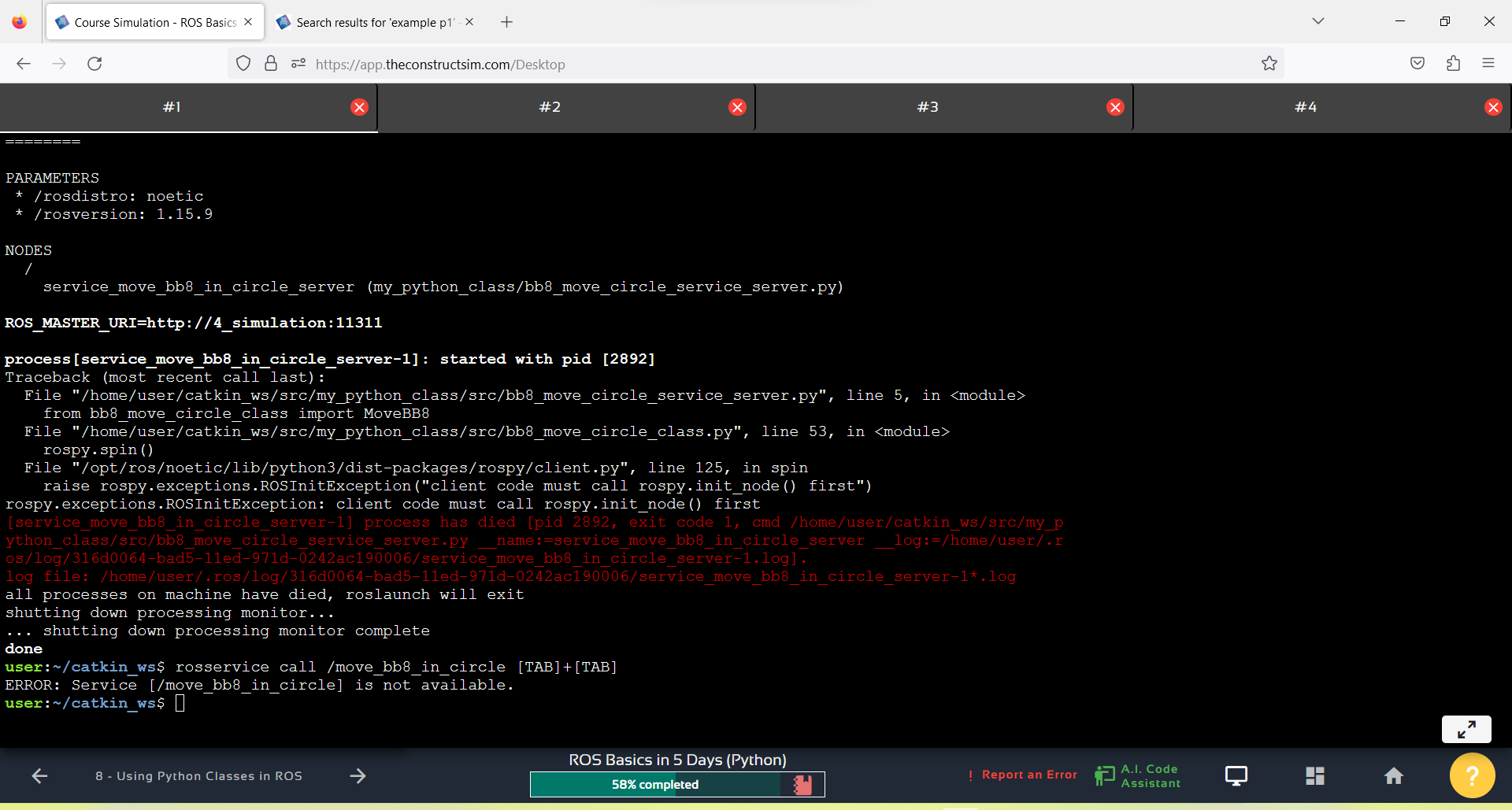
Also I saw another mistake in your picture:
rosservice call /move_bb8_in_circle [TAB]+[TAB]
You should not type the above line as is.
You should type upto rosservice call /move_bb8_in_circle and then press TAB key on yor keyboard twice. You should not type “[TAB]+[TAB]”.
Regards,
Girish