It seems as thought the drone in Example 4.5 and Exercise 4.2 is in the wrong location. It is too close to the human model, meaning the camera cannot detect the Waterhole. Is it possible to move the drone to a more suitable position, or have I missed something.
Hello @dhenness,
The robot should automatically move to a position that allows the detection. Where is it going in your case? Could you please share an image?
Best,
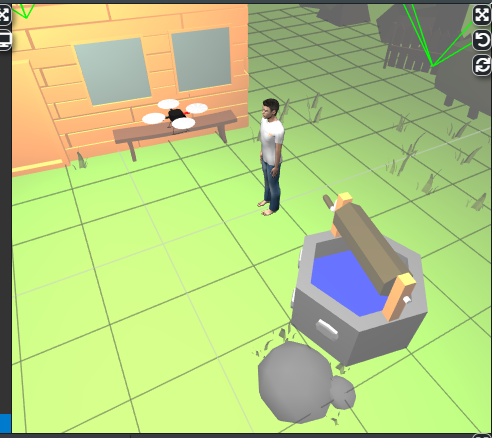
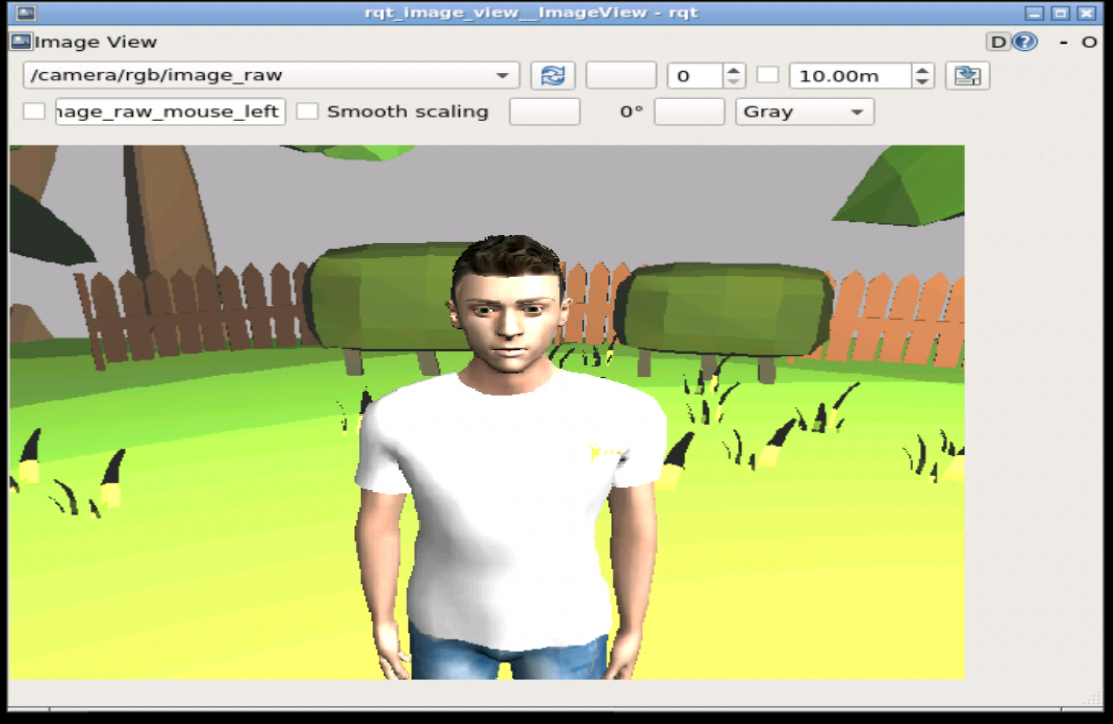
Attached are the images. The first image shows the location of the drone, while the second shows the output of rqt_image_view. No other commands have been entered and this is how the simulation is even after reloading the simulation.
Many thanks
Hello @dhenness,
Ok, I see the error. While we solve it, I suggest you move the drone by your own, using the keyboard. You can do so with the following command:
rosrun custom_teleop teleop_twist_keyboard.py
You will need to increase the speed using the q key.
Best,