Hi, At first again I would like to congratulate the RIA team for the path planner course. I was pretty interested too learn these concepts more deeply! The course is being phenomal!
Well regarding this class I would like to advertise about some errors and make questions (hehe as usual)
1 - I am not sure if my web browser is with issues, or if the equation images of heuristics (Euclidian and Manhatan) in svg format is not displayed in the course.
2 - Also trying to open a previous lesson in parallell ( from the option Review Notebook), this course module (path planning) returns error and does not open.
3- I realized that there is not a specific tag to put the path planners questions, then that is why I am putting in Robot Motion Planning Category
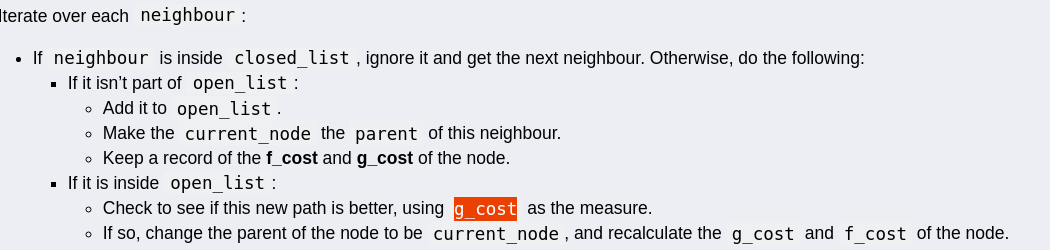
4 - During implementation of A* Star algorithm there are different instructions to be done, regarding code to neighbours already checked and found inside open_list previously:

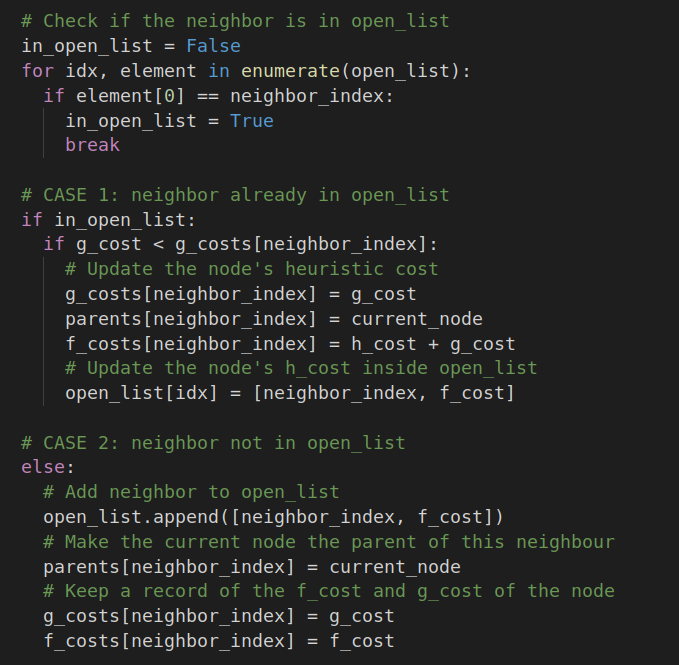
The my code changed from the solution a little bit:
My_code:
Solution:
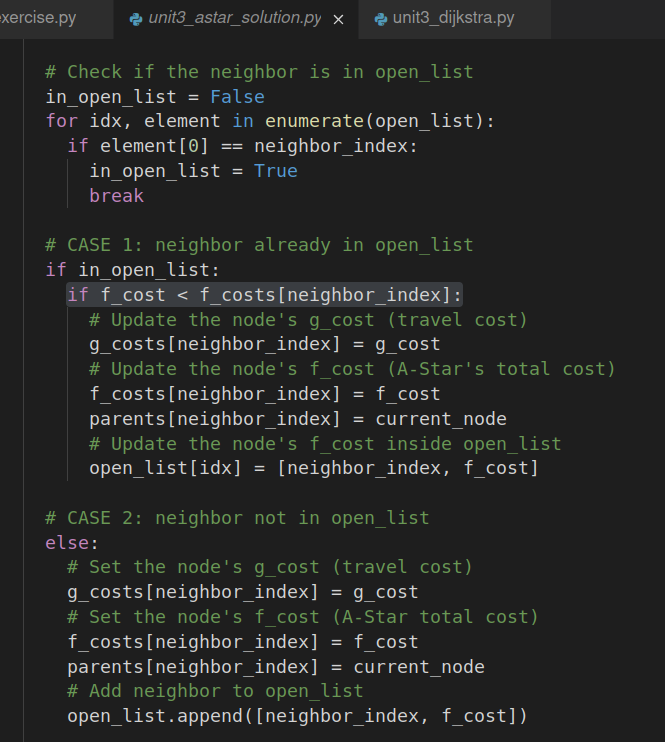
Although there was a conceptual difference between my code and the solution. The resul was the same using rviz and the robot navigated with success even in concave region, finding the best short path. Is my code “incomplete”, I mean in same specific situation using just g_cost to comparion in that specific block would cause a sub-optimal behaviour or other issue? What is the correct instruction, use the g_cost or f_cost in open_list block of code?
5- I did not understand completely the grid to world frame conversion, especially why for x_map there is a modulus operator and for y_map the floor division operator was used.
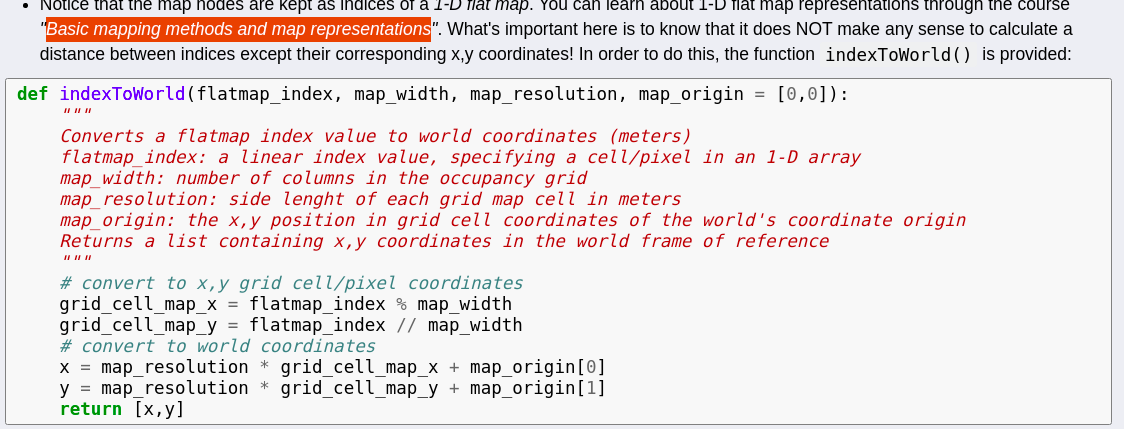
You suggested to read the course Basic mapping methods and map representations to learn in more detail. Is a RIA course? where is located please? I tried to find in search icon without success.
Finally a kind of copy of the last doubt of a very long previous question (sorry for that) from here:
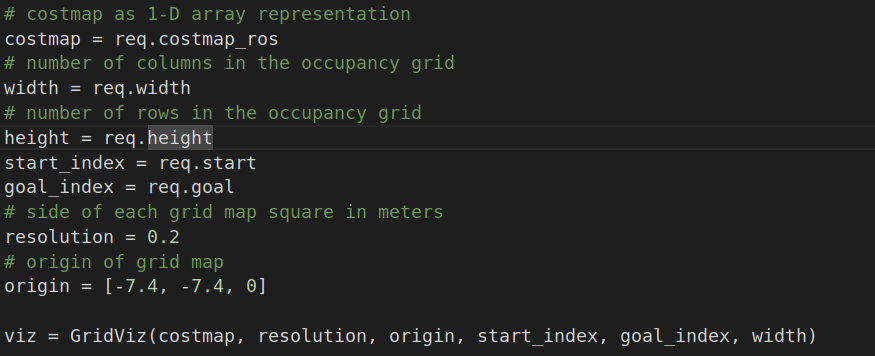
6 - I cannot understand where the value of the parameters are given (width, height,etc) from simulation I would say: Ok it is 1 for each square side…but where this value is actually passed/taken?
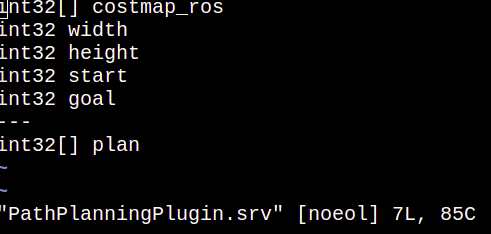
7 - The make plan is the name of a created service previously? I tried to locate on RIA to figure out from where does it come and go to integrate with rviz. This make plan create the response of the service defined in “PathPlanningPlugin” (which is the path list) ?Or does it call a client to request the map width, height and parameters? I forgot a little bit of Services within ROS nav stack integration.

Thanks again staff!