Hi support,
I am working on a differential robot on RDS in a public project. I can view it on rviz but can’t spawn in Gazebo. In particular, I spawn with:
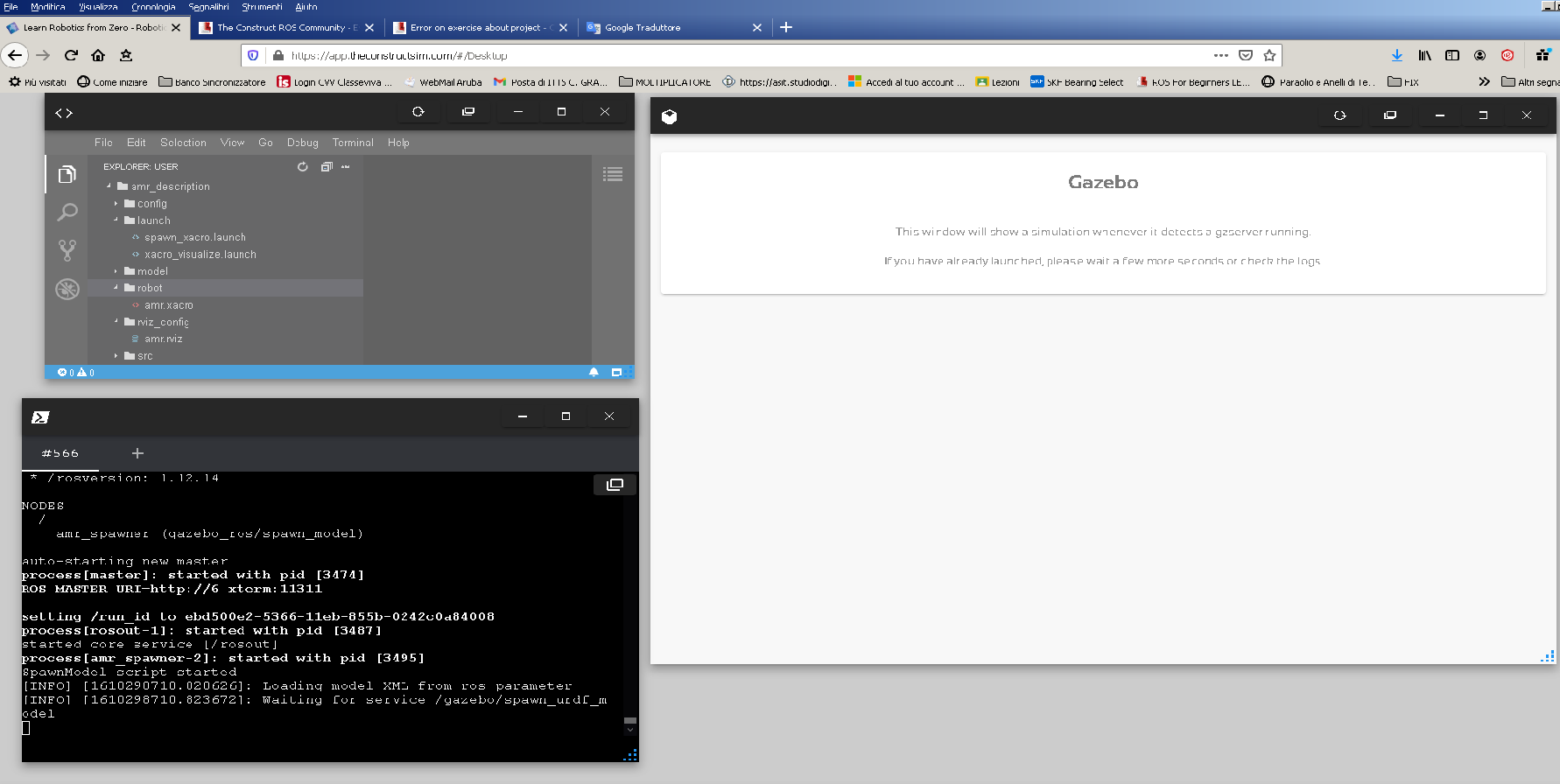
roslauch amr_description spawn_xacro.launch, do not happen anything in Gazebo’s window.
Really, I don’t know what to do because ROS returns no errors and I don’t know where is the log file.
Thanks in advance for any suggestions.
Hi,
Could you share the ROSject here? Becuase it seem sthat you have something wrong in the launch of the worldbecause its waiting the spawner there still, so gazebo hasnte properly started, an dtherefore not gazebo window will appear.
Hi duckfrost,
I tried to share the project. I hope I have succeeded. Let me know.
Thanks
Salvatore