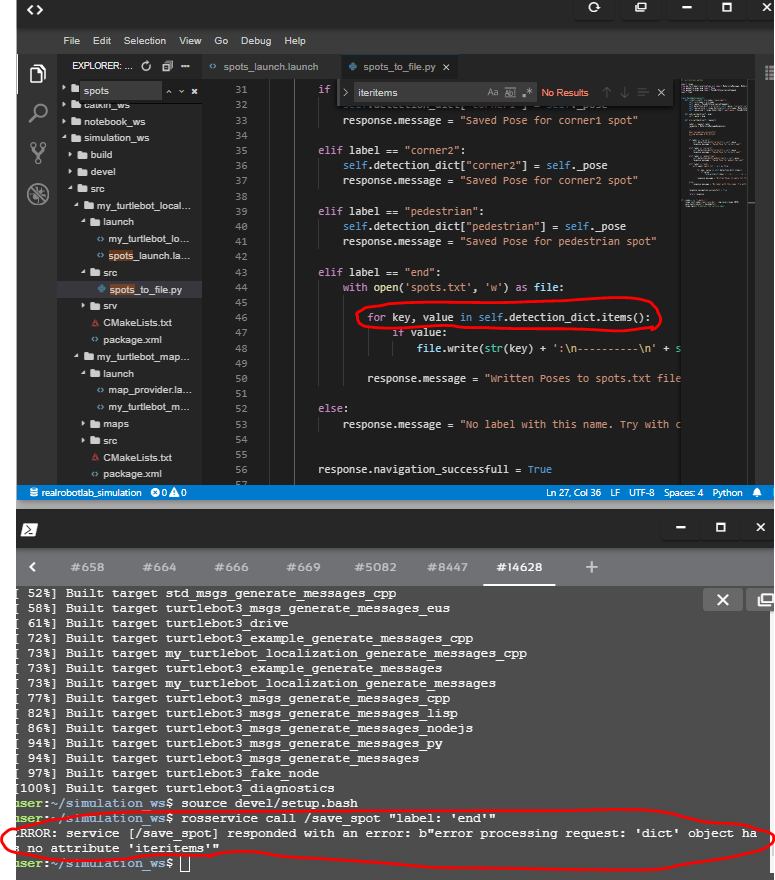
I have changed the syntax as python 3 yet, the same exception is thrown. I would appreciate any reference solution.
#! /usr/bin/env python
import rospy
from my_turtlebot_localization.srv import MyServiceMessage, MyServiceMessageResponse
from geometry_msgs.msg import Pose
from geometry_msgs.msg import PoseWithCovarianceStamped
import time
class SaveSpots(object):
def init(self, srv_name=’/save_spot’):
self._srv_name = srv_name
self._pose = PoseWithCovarianceStamped()
self.detection_dict = {“corner1”:self._pose, “corner2”:self._pose, “pedestrian”:self._pose}
self._my_service = rospy.Service(self._srv_name, MyServiceMessage , self.srv_callback)
self._pose_sub = rospy.Subscriber(’/amcl_pose’, PoseWithCovarianceStamped , self.sub_callback)
def sub_callback(self, msg):
self._pose = msg
def srv_callback(self, request):
label = request.label
response = MyServiceMessageResponse()
"""
---
bool navigation_successfull
string message # Direction
"""
if label == "corner1":
self.detection_dict["corner1"] = self._pose
response.message = "Saved Pose for corner1 spot"
elif label == "corner2":
self.detection_dict["corner2"] = self._pose
response.message = "Saved Pose for corner2 spot"
elif label == "pedestrian":
self.detection_dict["pedestrian"] = self._pose
response.message = "Saved Pose for pedestrian spot"
elif label == "end":
with open('spots.txt', 'w') as file:
for key, value in self.detection_dict.items():
if value:
file.write(str(key) + ':\n----------\n' + str(value) + '\n===========\n')
response.message = "Written Poses to spots.txt file"
else:
response.message = "No label with this name. Try with corner1, corner2, pedestrian or end(to write the file)"
response.navigation_successfull = True
return response
if name == “main”:
rospy.init_node(‘spot_recorder’, log_level=rospy.INFO)
save_spots_object = SaveSpots()
rospy.spin() # mantain the service open.