Hi, I have a problem.
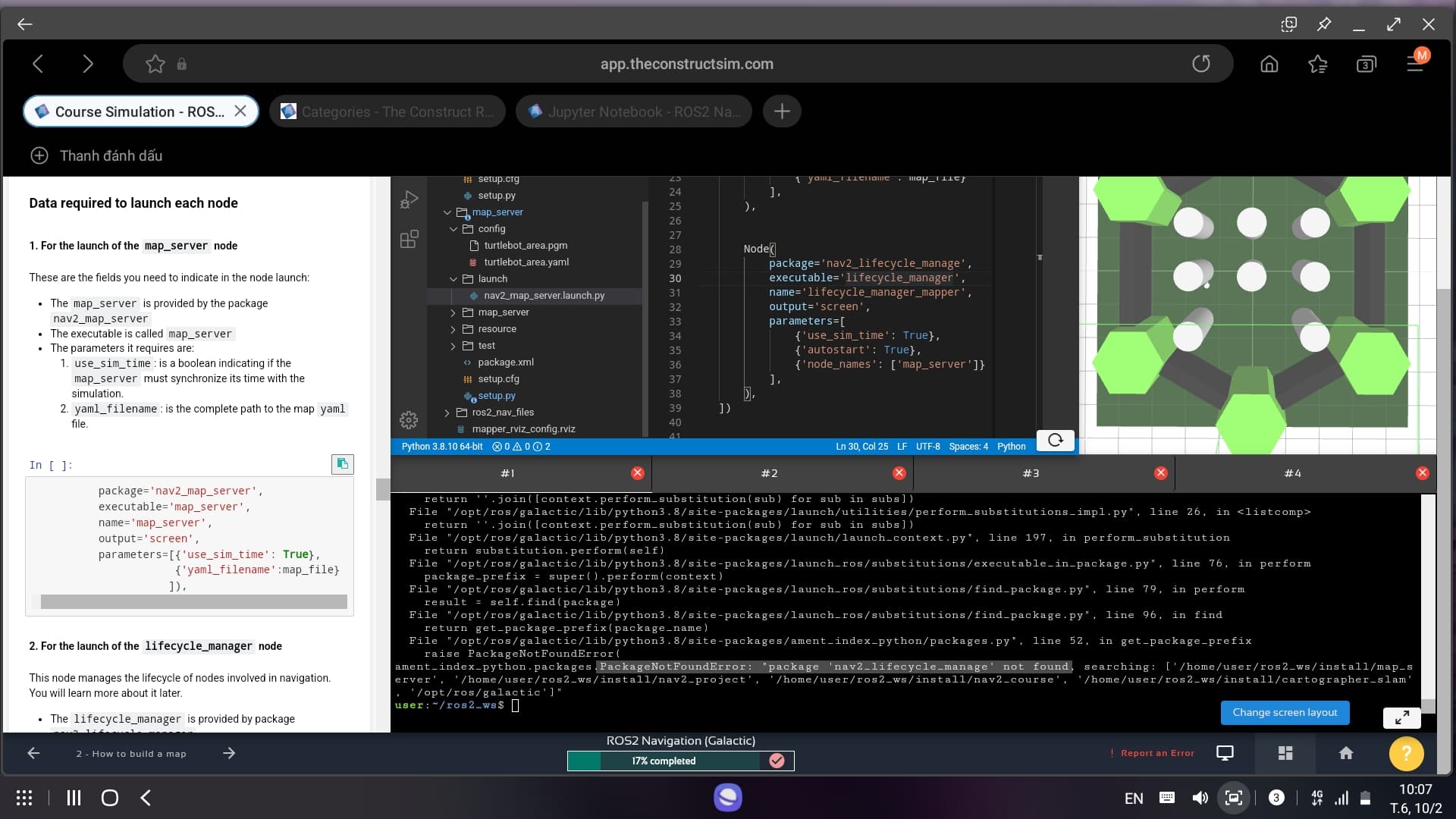
I follow the instruction but I got error: PackageNotFoundError: "package ‘nav2_lifecycle_manage’ not found.
I tried to add nav2_lifecycle_manage in package.xml but it does not work.
Please, check and help me.
Thanks.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
map_file = os.path.join(
get_package_share_directory('map_server'), 'config', 'turtlebot_area.yaml'
)
return LaunchDescription([
Node (
package='nav2_map_server',
executable='map_server',
name='map_server',
output='screen',
parameters=[
{'use_sim_time': True},
{'yaml_filename': map_file}
],
),
Node(
package='nav2_lifecycle_manage',
executable='lifecycle_manager',
name='lifecycle_manager_mapper',
output='screen',
parameters=[
{'use_sim_time': True},
{'autostart': True},
{'node_names': ['map_server']}
],
),
])
from setuptools import setup
import os
from glob import glob
package_name = 'map_server'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'),
glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'config'),
glob('config/*')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='user',
maintainer_email='user@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>map_server</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="user@todo.todo">user</maintainer>
<license>TODO: License declaration</license>
<depend>nav2_lifecycle_manage</depend>
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>