hello i need some help in exercise 3.1
i did the launch file,yaml f
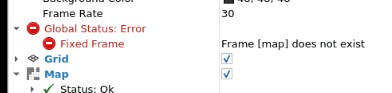
ile but when i start the rviz and run the map, i got this error:
help.please
hello i need some help in exercise 3.1
i did the launch file,yaml f
ile but when i start the rviz and run the map, i got this error:
help.please
This usually means that the node in charge of publishing the map frame is not working. What does the output of your amcl node?
ok, my mistake i think thats what i need to get (what i show you in the picture)
but i still got the same error with the map…
You can define the initial pose by opening rviz and clicking on the 2D pose estimate at one of the top menus. You can also define it in the configuration file if you know where the robot is going to be. Once you set it, then the map frame should be created
thanl you very much, it work.