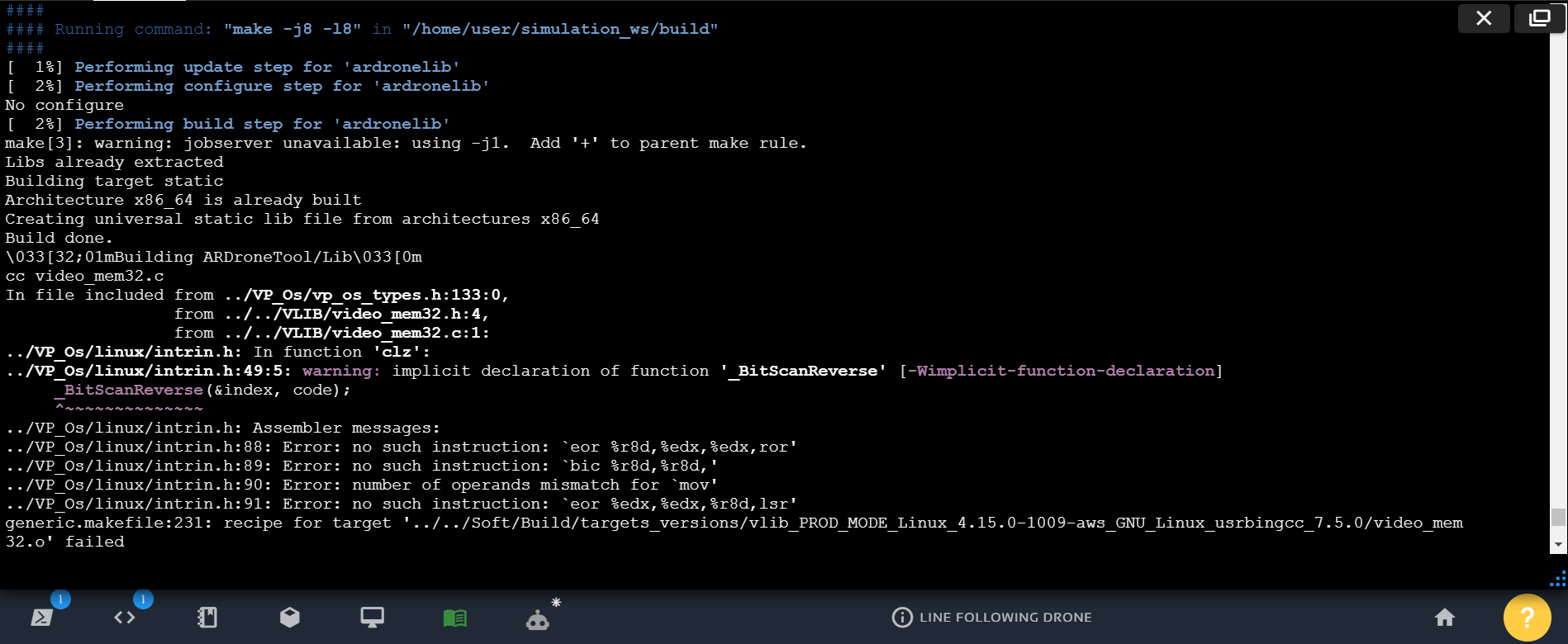
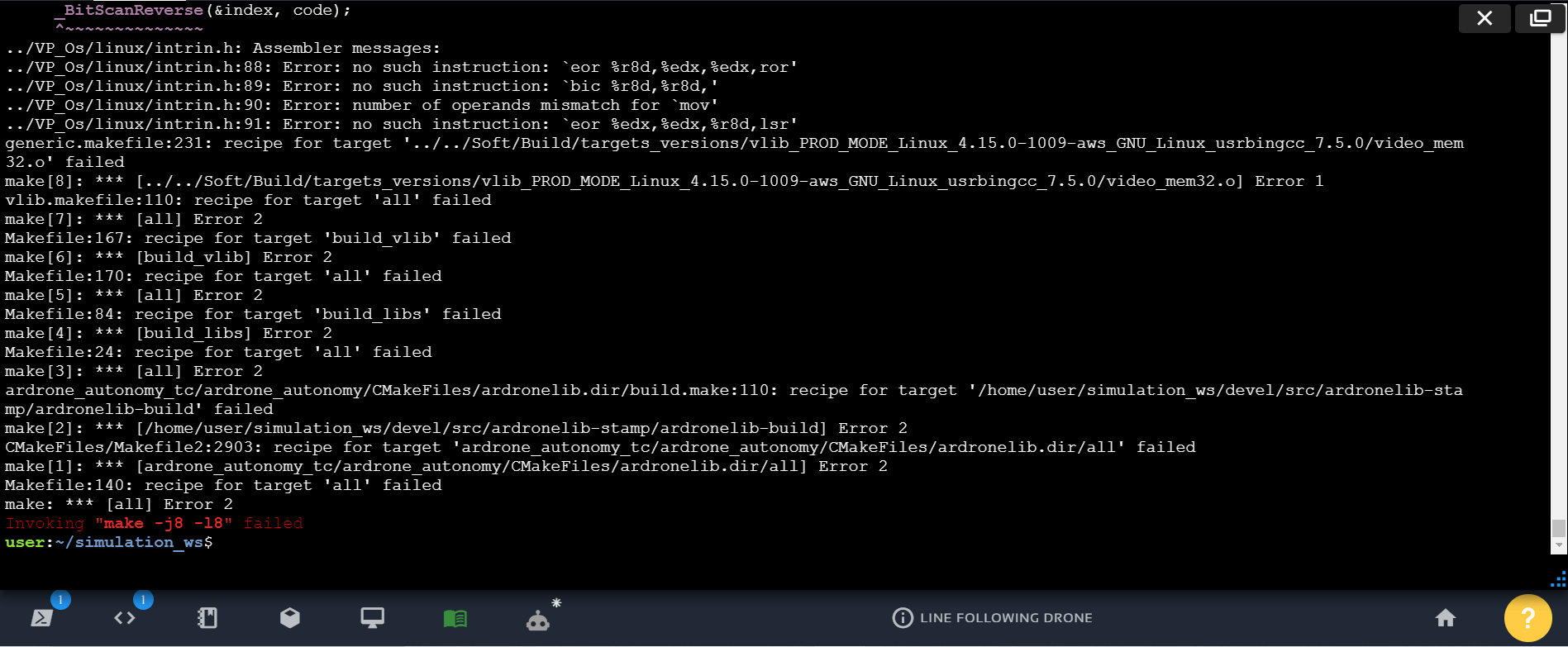
hello there, i was working with ROSDS Melodic Distro(since the Kinetic Distro has some issues with the Gazebo Window where it isn’t displaying the toolbar in it). i cloned the ardrone_autonomy package and building the package using catkin_make and i had some errors in it!
It would be great help if someone could let me know the solution to this error!
thank you in advance!
If this is the repo you cloned, then notice how the default branch is indigo-devel. This looks a lot like the package hasn’t been tried in Kinetic nor Melodic.
Try using a noetic rosject with the following repo (branch noetic):Bitbucket
thank you for the reply,
does this Bitbucket package have ardrone_driver(or similar to it) so i can connect with the drone i am using in the real world or is there any way i can connect to real robot without the ardrone_driver in ROSDS?
You would need to implement the driver released by ardrone. Check this one out (kinetic): ardrone_autonomy - ROS Wiki.
If you want to connect your ardrone with ROSDS, then you will need to have ROS running in it