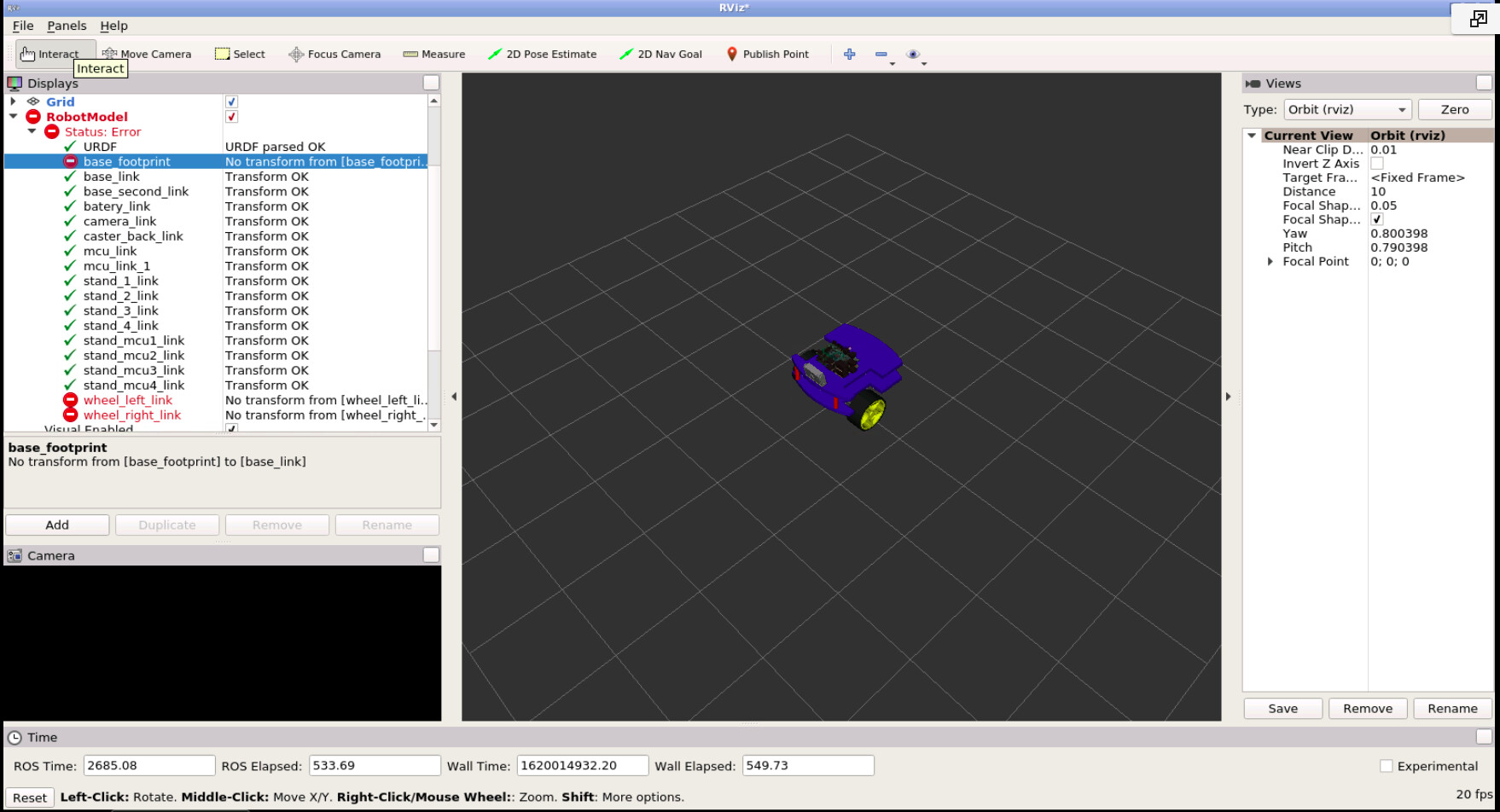
Hi, i am creating my own robot for a personal project, i am taking as guide the course Create Your First Robot with ROS. but when making the simulation i have an error.
i think is a conflict with the transformations. seems like gazebo disconect the two wheels from the transformation.
Does anyone knows why this happen and how to solve it?
(perhaps something about the differential drive gazebo plugin)?
Hi,
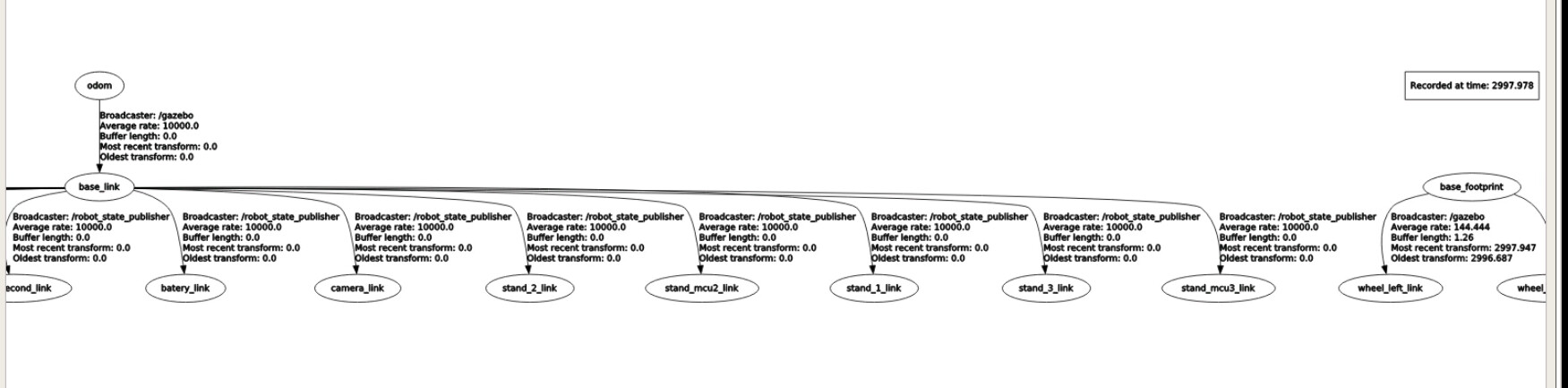
This is related to the differential drive that doesn’t connect the TFs, Its not a big deal as for the course, but if you want to fix it you will have to check the differential drive ruling configuration or just publish a static transform that connects the Base_footprint link with the base_link.
Hi,
I can’t see what is wrong with the differential drive setup in the rosbots.gazebo.xacro. It uses the base_link as the robotBaseFrame so I don’t see why as in the above screenshot gazebo is publish the transform between the base_footprint and the wheels rather than the base_link and the wheels.
As I look at it the base_footprint & base_joint just provide a ‘z’ offset to the base_link. So as a simple ‘fix’ I removed the base_footprint & base_joint from the main .xacro and everything linked up correctly.