Hi,
In Unit 1 of URDF for Robot Modeling where Joints and Links were first introduced, the following definition is given for Joint-axis parameter:
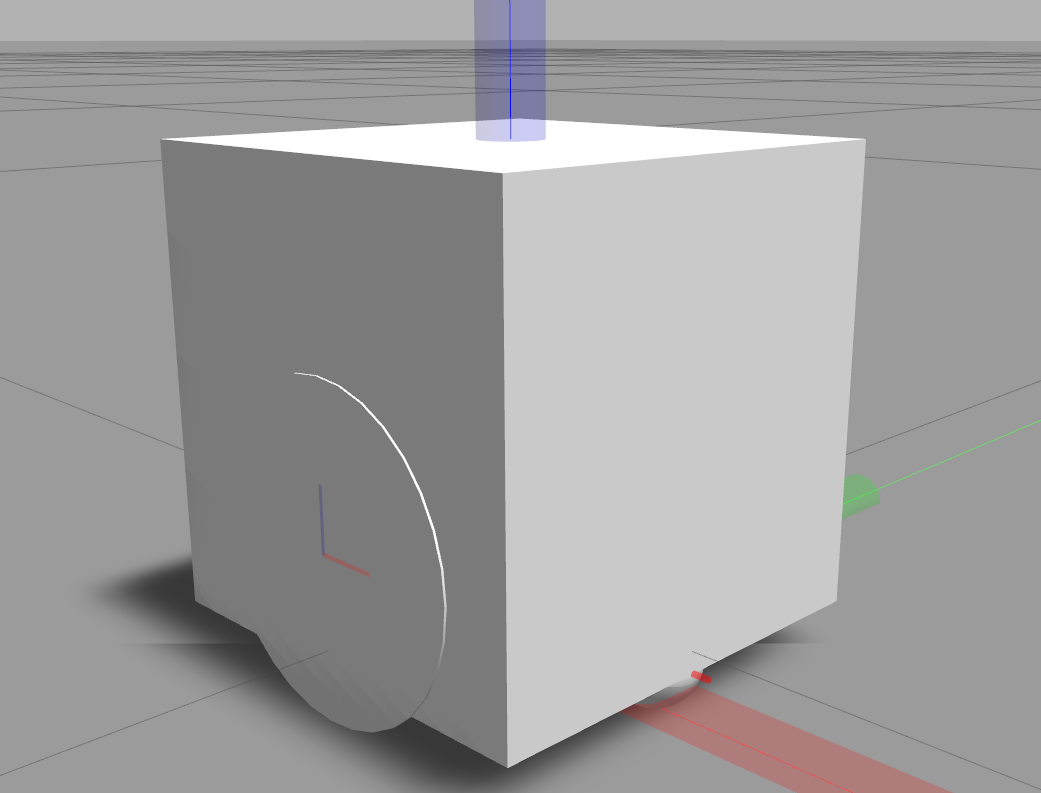
Axis: Here you define around which Parent’s AXIS the Child link will revolve. This, of course,
depends on the type of joint; some of them don’t have axis tags because they are irrelevant, such as the fixed joint.
But in the ROS Wiki the following definition is given for Axis.
axis (optional: defaults to (1,0,0))
The joint axis specified in the joint frame. This is the axis of rotation for revolute joints, the axis of
translation for prismatic joints, and the surface normal for planar joints. The axis is specified in the
joint frame of reference. Fixed and floating joints do not use the axis field.
The ROS wiki also states that Joints Frame = Child's Frame.
The Axis definitions therefore seem to contradict each other. Any help on understanding this better would be highly appreciated.
TIA