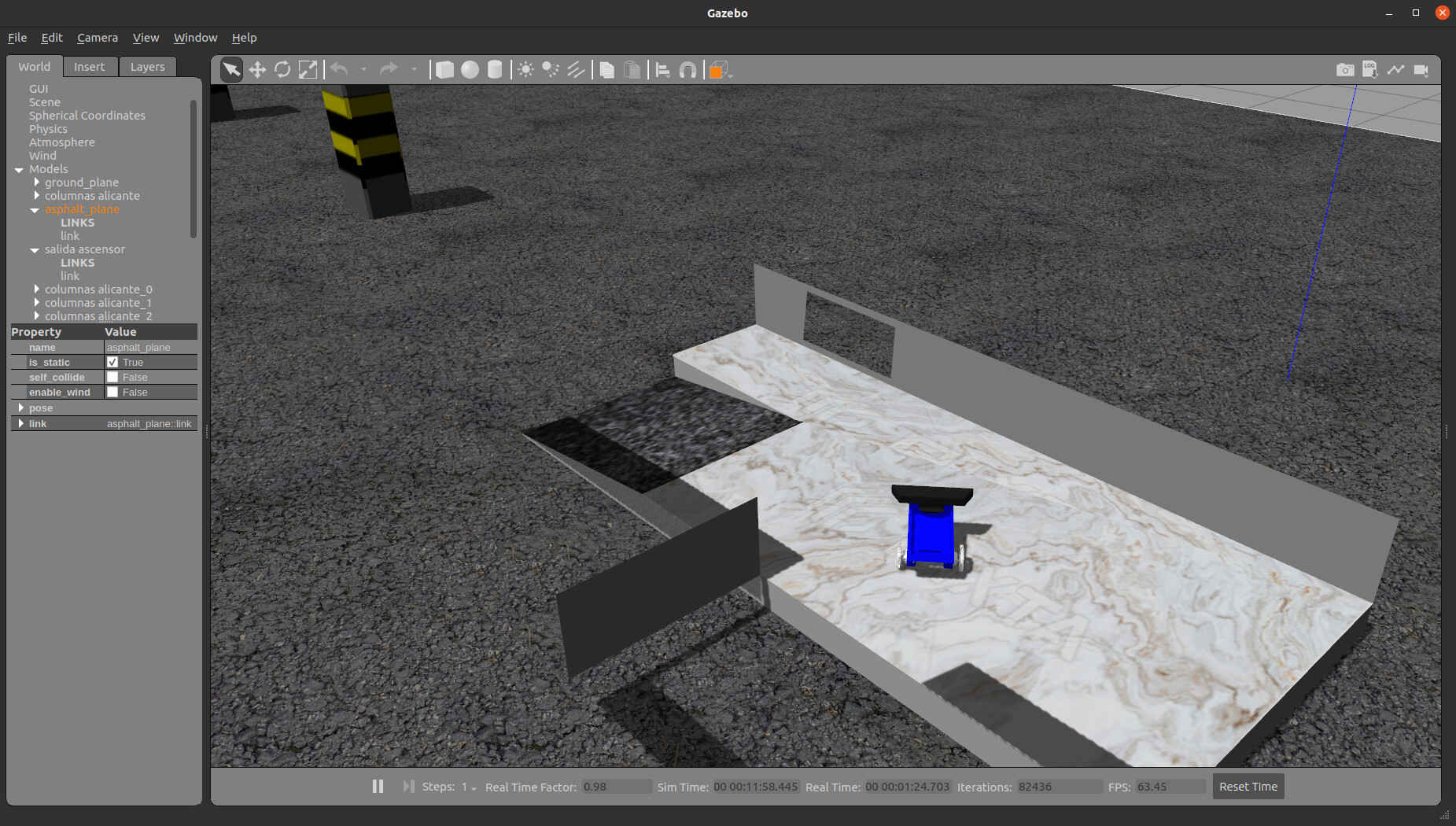
Hi, i am currently working on a personal project, i am trying to add a depth camera to my mobile robot, while doing some tests, i am facing with this issue:
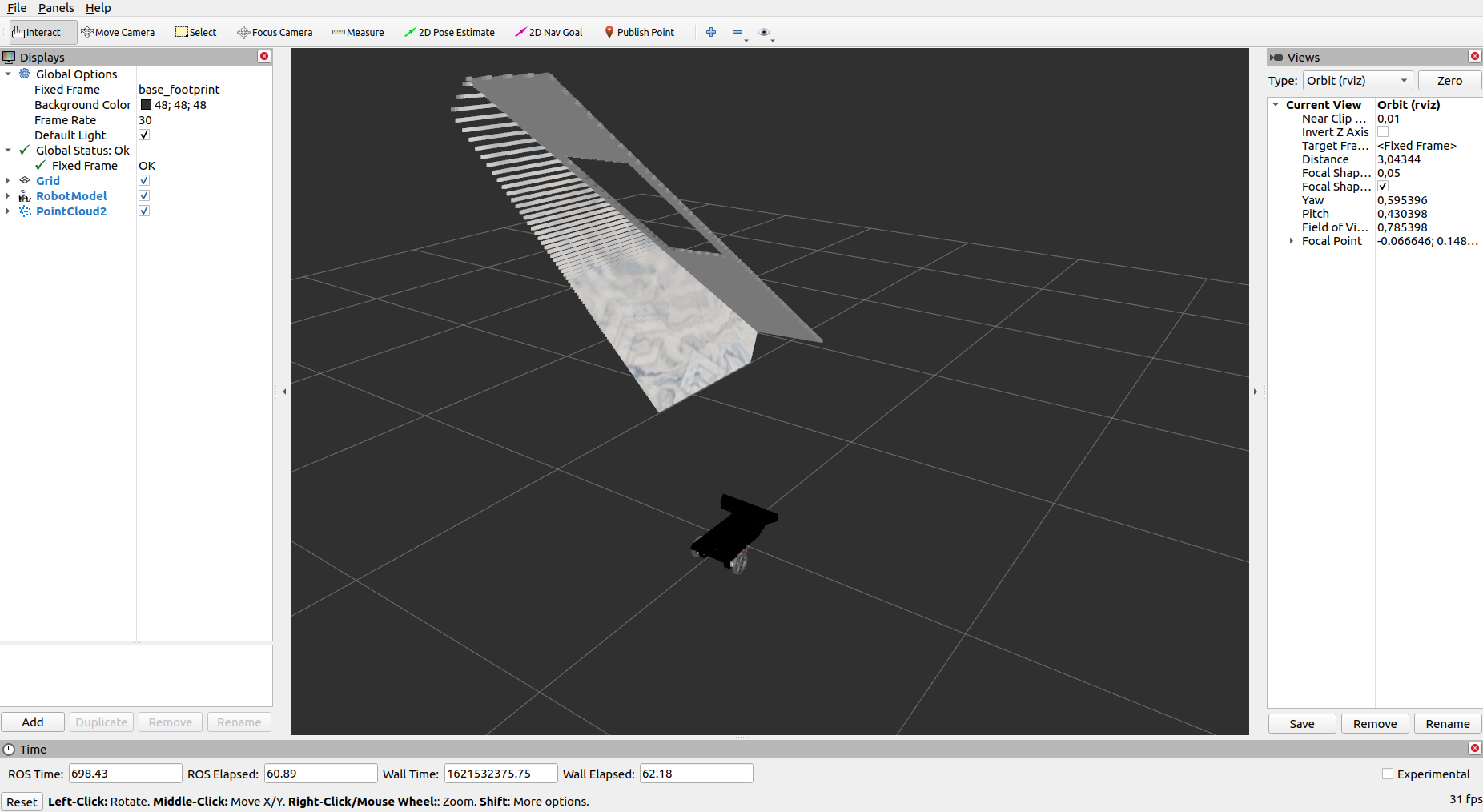
As you can see, the depth camera is well positioned, but in rviz is not well ilustrating, is like is projecting the pointclouds in the wrong direction.
Does anyone knows how can i solve this? is pretty strange and i ran out of ideas. i am looking to documentation.
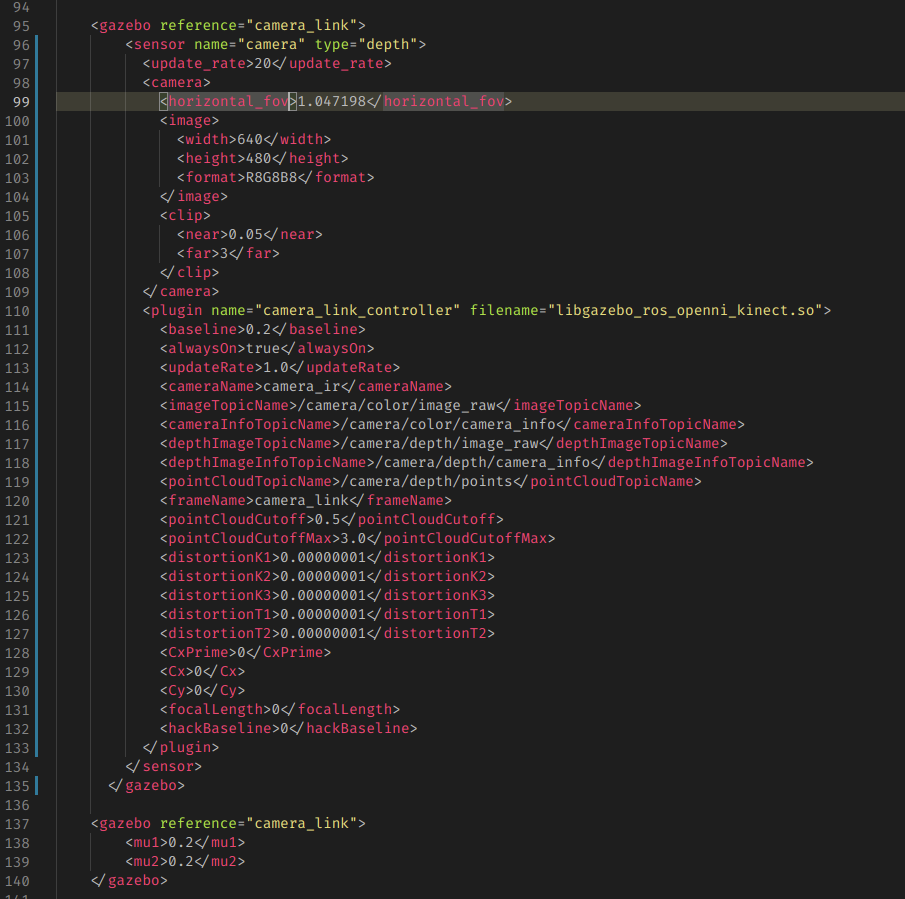
i am using Depth camera and here is how i implemented it:
urdf:
gazebo plugins:
any comment is apreciated.
Hi,
This is a known issue with Pointcloud cameras. The Frames have to be rotated in a certain way in order to have them working properly. Here you have the example of box_bot ( training simple robot ) that has loads of sensors . Have a look at how the pointcloud is created and just copy paste it ;).
BOX_BOT_EXAMPLE_NOETIC
1 Like
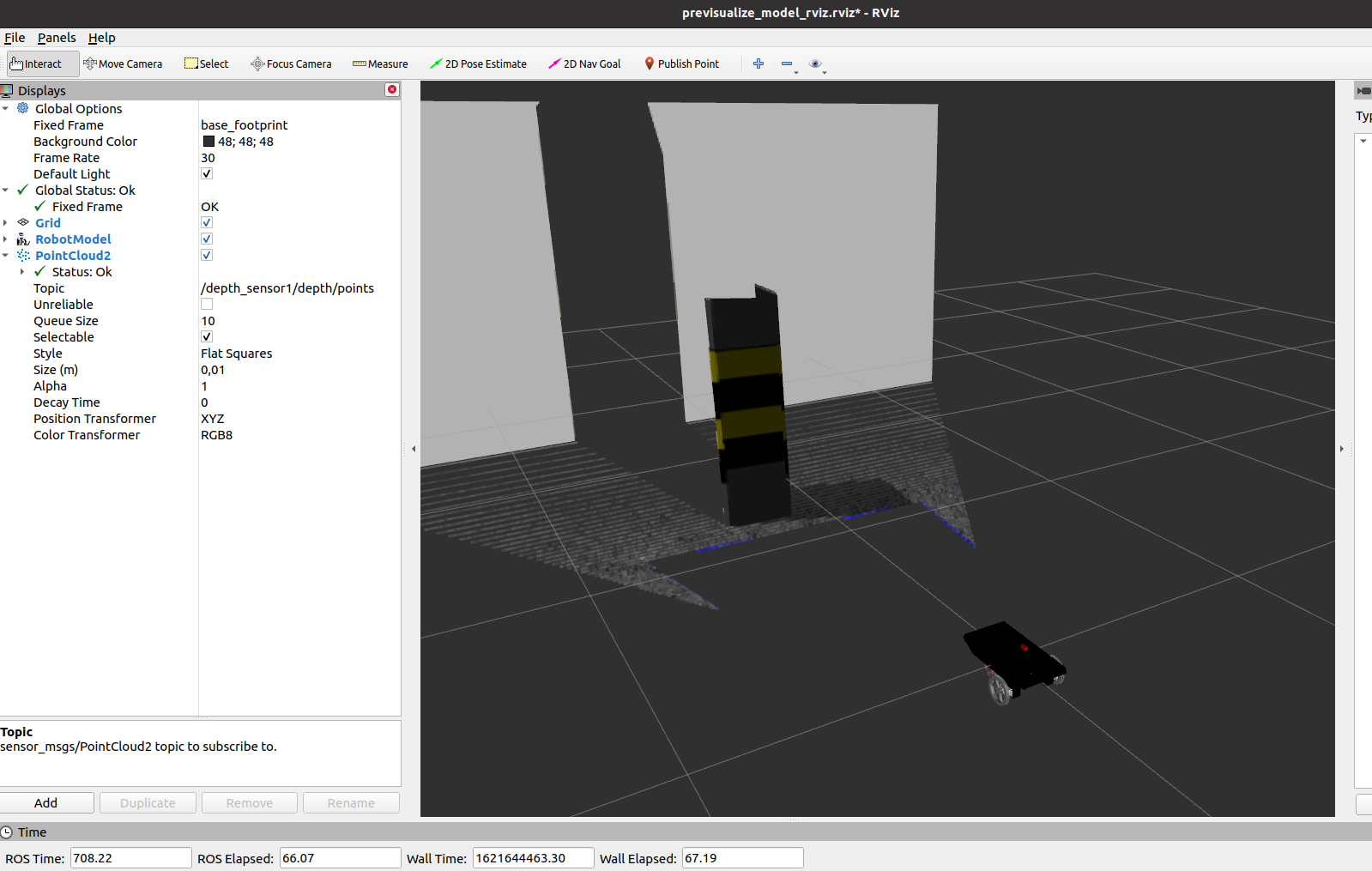
@duckfrost Thank you very much, after carefully read your (large) xacro files, i could make it:
i just have to add my dae file to look like a kinect. curious way of how the pointclouds are proyected but the key seems to be this property named FrameName.
1 Like