Good morining. I’m Italian from Naples and I’m a beginner. .I’m following all the steps of the tutorial [ROS Q&A] 003 – How to control a Gazebo simulated robot with MoveIt! ? (UR5) but i have an error when I launch this comand: roslaunch demo_moveit_config demo_planning_execution.launch. The error is: RLException: unused args [config] for include of [/home/skyblu/simulation_ws/src/demo_moveit_config/launch/moveit_rviz.launch]
The traceback for the exception was written to the log file and i don’t understand . I’have running all the steps described. Can you help me?. Thenk You
Hi,
That error indicates that the argument config in the launch file is not used. This normally means that you misspelt it or you are putting it as an argument in a launch that doesn’t have it.
Sorry I’m a beginner and I have follow all the steps described to the link: [ROS Q&A] How to control a Gazebo simulated robot with MoveIt? (UR5). The launch file described is:demo_planning_execution.launch
[/joint_states] IF I delete , the function RVIZ started and the plan it works properly. IF i click the EXECUTE , the message is " FAILED" Because. Thank YouHi,
I recommend you to do then the course on Robot Manpulation and industraol robots 101. There you will learn the basis of moveit configuration generation.
Ok I will . Thank You for attention
hi could you please help me solve this problem The course ROS 101 does not run .
thank you in advance,
best regards.
hi, i have the same problem, could you please tell me how did you solve it
regards.
@Halim What exactly is your issue? Could you post some screenshots here an some code that we can reproduce your error?
1 Like
Hi the solution to my error was to change the File “demo_planning_execution.launch”, line 19 column 16
"config " to “rviz_config”
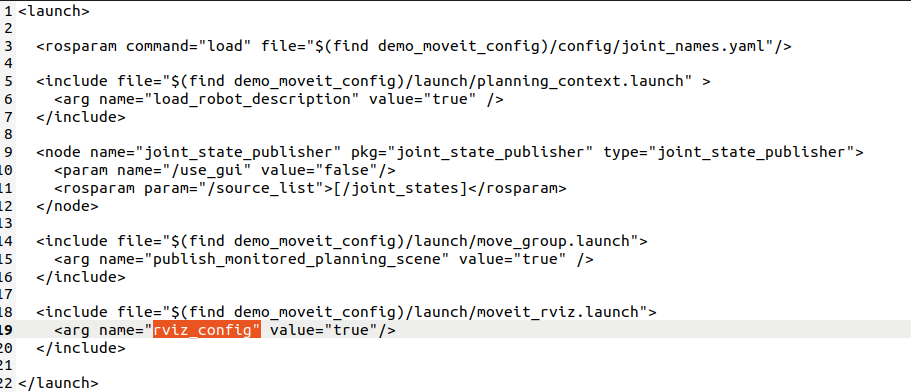
regards
Halim
1 Like
Great to know you fixed it 