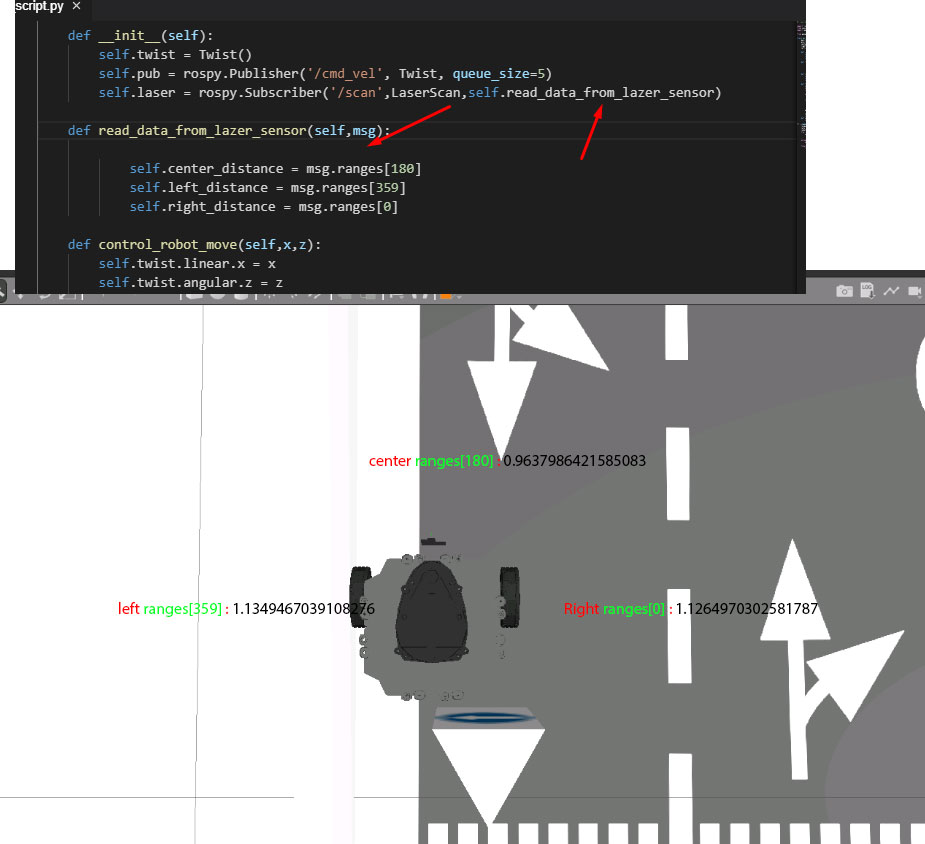
I doing “Ros basic 5 days” project , when i get data from laser scan it look not fit with the robot in simulator , check more here
Hi @acscoder, welcome to the comunity.
Try running Rviz and add the Laser display, there you can have a better look to what the robot is seing. perhaps the robot is lost, try restarting the simulation. also check out the LIdar documentation seems like you are confusing the ranges position:
LIDAR DOCUMENTATION
2 Likes