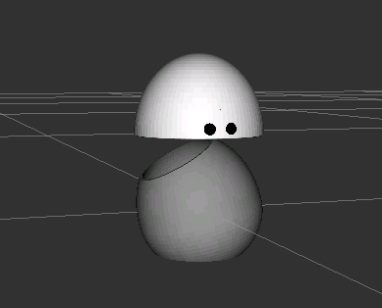
Hello guys, When I tried to import the dae file to the urdf. The position of the Mira’s body inclined for no reason.
What happend?
Here is the code:
<?xml version="1.0"?>
<robot name="mira">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="red">
<color rgba="0.8 0 0 1"/>
</material>
<material name="green">
<color rgba="0 0.8 0 1"/>
</material>
<material name="grey">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1.0 1.0 1.0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<!-- * * * Link Definitions * * * -->
<link name="base_link">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://my_mira_description/models/mira/meshes/mira_body_v3.dae"/>
</geometry>
</visual>
</link>
<link name="roll_M1_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.005" radius="0.01"/>
</geometry>
<material name="red"/>
</visual>
</link>
<joint name="roll_joint" type="revolute">
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
<link name="pitch_M2_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.005" radius="0.01"/>
</geometry>
<material name="green"/>
</visual>
</link>
<joint name="pitch_joint" type="revolute">
<parent link="roll_M1_link"/>
<child link="pitch_M2_link"/>
<origin xyz="0 0 0" rpy="0 -1.5708 0"/>
<limit lower="0" upper="0.44" effort="0.1" velocity="0.005"/>
<axis xyz="0 1 0"/>
</joint>
<link name="yaw_M3_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.005" radius="0.01"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<joint name="yaw_joint" type="continuous">
<parent link="pitch_M2_link"/>
<child link="yaw_M3_link"/>
<origin xyz="0.01 0 0" rpy="0 1.5708 0"/>
<limit effort="0.1" velocity="0.01"/>
<axis xyz="0 0 1"/>
</joint>
<link name="head_link">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://my_mira_description/models/mira/meshes/mira_head_v5.dae"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="base_head_joint" type="fixed">
<parent link="yaw_M3_link"/>
<child link="head_link"/>
<origin xyz="0 0 0.06" rpy="0 0 0"/>
</joint>
<link name="left_eye_link">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://my_mira_description/models/mira/meshes/mira_eye_v4.dae"/>
</geometry>
<material name="black"/>
</visual>
</link>
<link name="right_eye_link">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://my_mira_description/models/mira/meshes/mira_eye_v4.dae"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="head_lefteye_joint" type="fixed">
<parent link="head_link"/>
<child link="left_eye_link"/>
<origin xyz="0.0095 0.057 0.0085" rpy="-1.5708 0 0"/>
</joint>
<joint name="head_righteye_joint" type="fixed">
<parent link="head_link"/>
<child link="right_eye_link"/>
<origin xyz="-0.0095 0.057 0.0085" rpy="-1.5708 0 0"/>
</joint>
<link name="camera_link">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.0005 0.0005 0.0005"/>
</geometry>
<material name="green"/>
</visual>
</link>
<joint name="head_camera_joint" type="fixed">
<parent link="head_link"/>
<child link="camera_link"/>
<origin xyz="0 0.057 0.0255" rpy="0 0 0"/>
</joint>
</robot>