I have been having an issue creating a custom action message and unable to figure out the error.
When I use this :
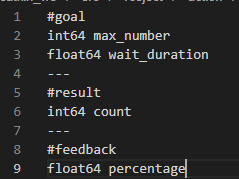
It compiles well and generates all the action topics.
But when I change the above to :
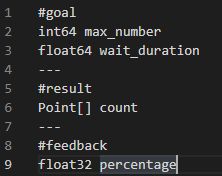
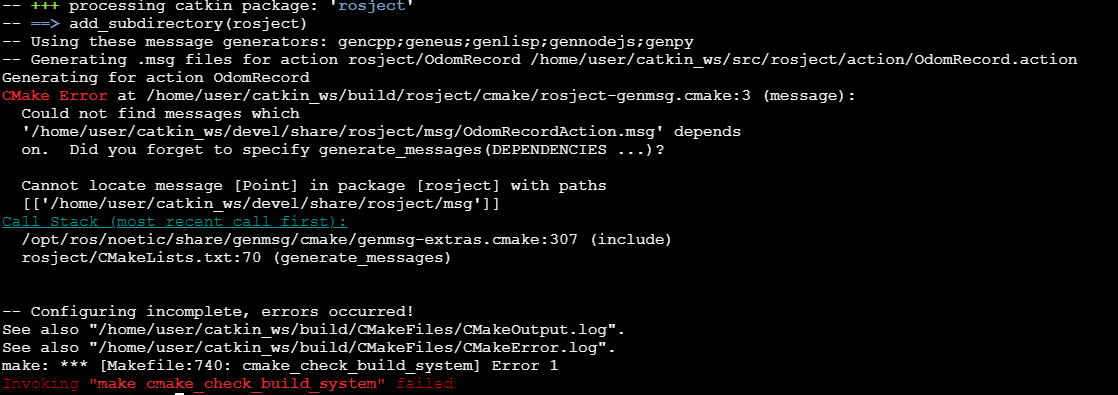
I get an error as such:
I believe I added all the necessary dependencies to the CMakelists file. Could anyone look and help me out.
I am guessing that there is a package for type
Point[] and should include in the dependencies also? I am not sure
Thank You
Hi @mamojiz97 ,
Point[] by itself does not exist as a datatype. It is a sub-type under geometry_msgs.
You should re-write the line as geometry_msgs/Point[].
You can use geometry_msgs/Point32[] for 32 bit float.
You can use geometry_msgs/Point[] for 64 bit float.
Point32 type is used in most cases as it gives you precision up to 7 decimal places, which is sufficient for most applications.
Point would be useful only in cases of GPS-like systems where you need (very) high-precision, because you would need up to 9 or 10 places of decimal values.
Your custom action message definition seems to be quite vague.
Why have you defined a count variable with geometry_msgs/Point[] datatype?
Point32[] / Point[] datatype has x , y , z as three float-type values.
If you are just counting something you could just use int-based datatype.
Anyways, it was just my suggestion. You can use your definitions as per your requirements.
Regards,
Girish
2 Likes
@girishkumar.kannan
Thank You so much for your help. While I posted the question, I had found the solution as well.
I will make the necessary changes like you said. The variables names are just left as is just until the message was compiled.
I do have a following question though. Where should I search for the datatype of a sub type?
I just came across an article but it wasn’t a dataset to show that these ‘so and so’ are sub types of this datatype.
Thanks
Mojiz
Hi @mamojiz97 ,
The best way is to do rosmsg list in your computer (or on the machine on which ROS is installed).
Attention: rosmsg list will list all messages in your computer, you can scroll down and choose the message type that you wish to use.
Here is an example: (this lists all ros package messages with “Point” in its name)
user:~$ rosmsg list | grep Point
control_msgs/PointHeadAction
control_msgs/PointHeadActionFeedback
control_msgs/PointHeadActionGoal
control_msgs/PointHeadActionResult
control_msgs/PointHeadFeedback
control_msgs/PointHeadGoal
control_msgs/PointHeadResult
geographic_msgs/GeoPoint
geographic_msgs/GeoPointStamped
geographic_msgs/WayPoint
geometry_msgs/Point # <<<---------- Point64 msg
geometry_msgs/Point32 # <<<---------- Point32 msg
geometry_msgs/PointStamped
image_view2/PointArrayStamped
jsk_interactive_marker/JointTrajectoryPointWithType
jsk_recognition_msgs/ClusterPointIndices
jsk_recognition_msgs/PointsArray
jsk_recognition_msgs/SlicedPointCloud
map_msgs/PointCloud2Update
moveit_msgs/CartesianPoint
moveit_msgs/CartesianTrajectoryPoint
opencv_apps/Point2D
opencv_apps/Point2DArray
opencv_apps/Point2DArrayStamped
opencv_apps/Point2DStamped
pcl_msgs/PointIndices
rtabmap_ros/KeyPoint
rtabmap_ros/Point2f
rtabmap_ros/Point3f
sensor_msgs/PointCloud
sensor_msgs/PointCloud2
sensor_msgs/PointField
teb_local_planner/TrajectoryPointMsg
trajectory_msgs/JointTrajectoryPoint
trajectory_msgs/MultiDOFJointTrajectoryPoint
But there is a caveat. Doing rosmsg list will only show the message packages installed on the system that is running ROS. So if you are looking for a specific message type that requires a ros-noetic-<pkg> to be installed on your system, then that message will not show up when you do rosmsg list until you install that specific ros package.
Finally, to know how a message is defined, you can do rosmsg show <msg_full_name>
user:~$ rosmsg show geometry_msgs/Point32
float32 x
float32 y
float32 z
So your options are as follows:
- Try to make use of the basic message types that gets installed with ROS default installation.
- Google (or search the web) for the specific message if it is not installed and install the package.
- Create your own message type, but make sure you do not multiple copies of same message.
I hope this clarified your doubt(s).
Regards,
Girish
2 Likes