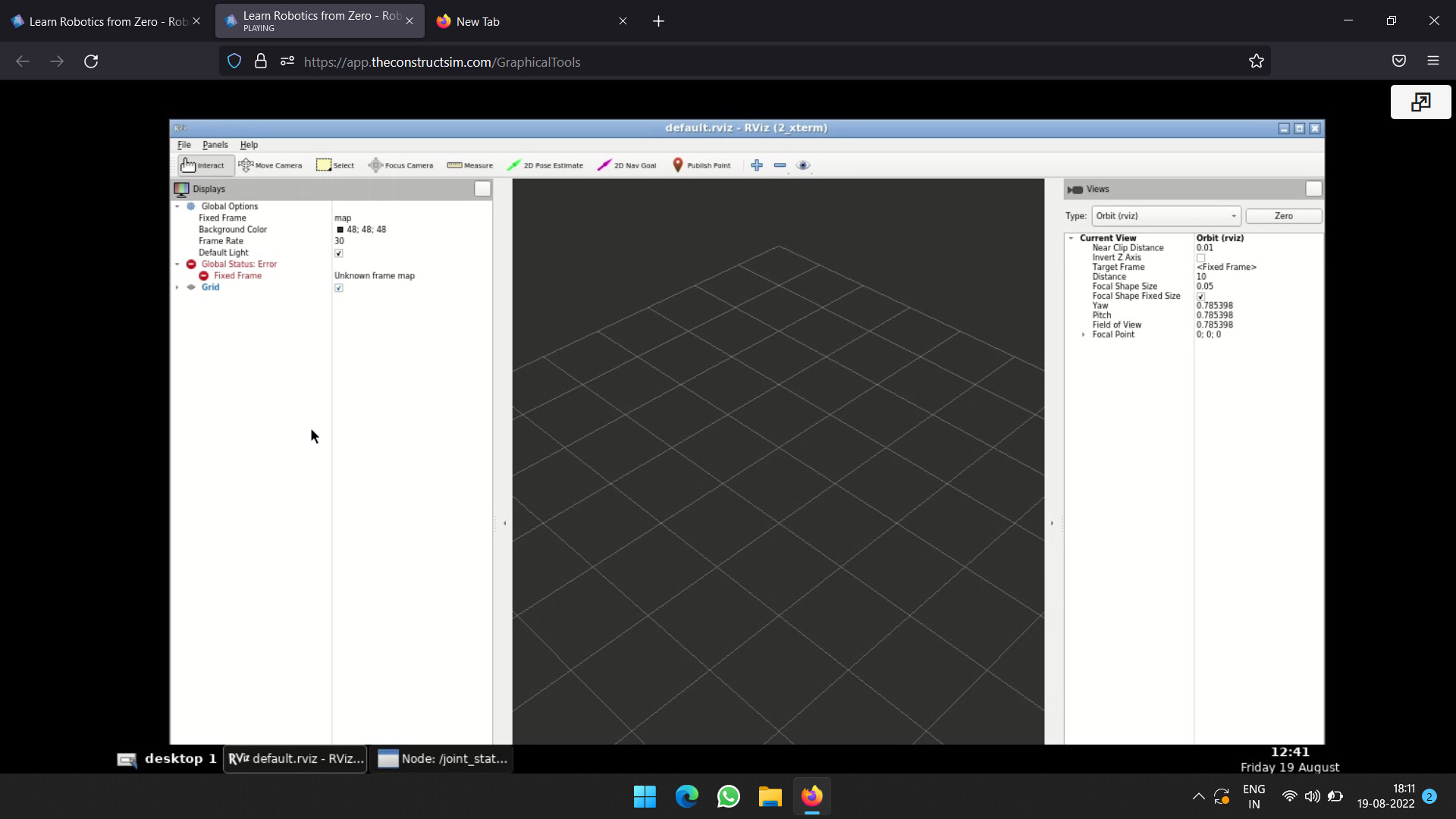
I have started " URDF for Robot Modeling" course yesterday. In unit 1 while after creating URDF file for mira robot and creating the launch file , I am not able to add the Robot model and TF in rviz. Can anyone please help me.
Hi,
Could you be a bit more specific ? Is because many things could be wrong.
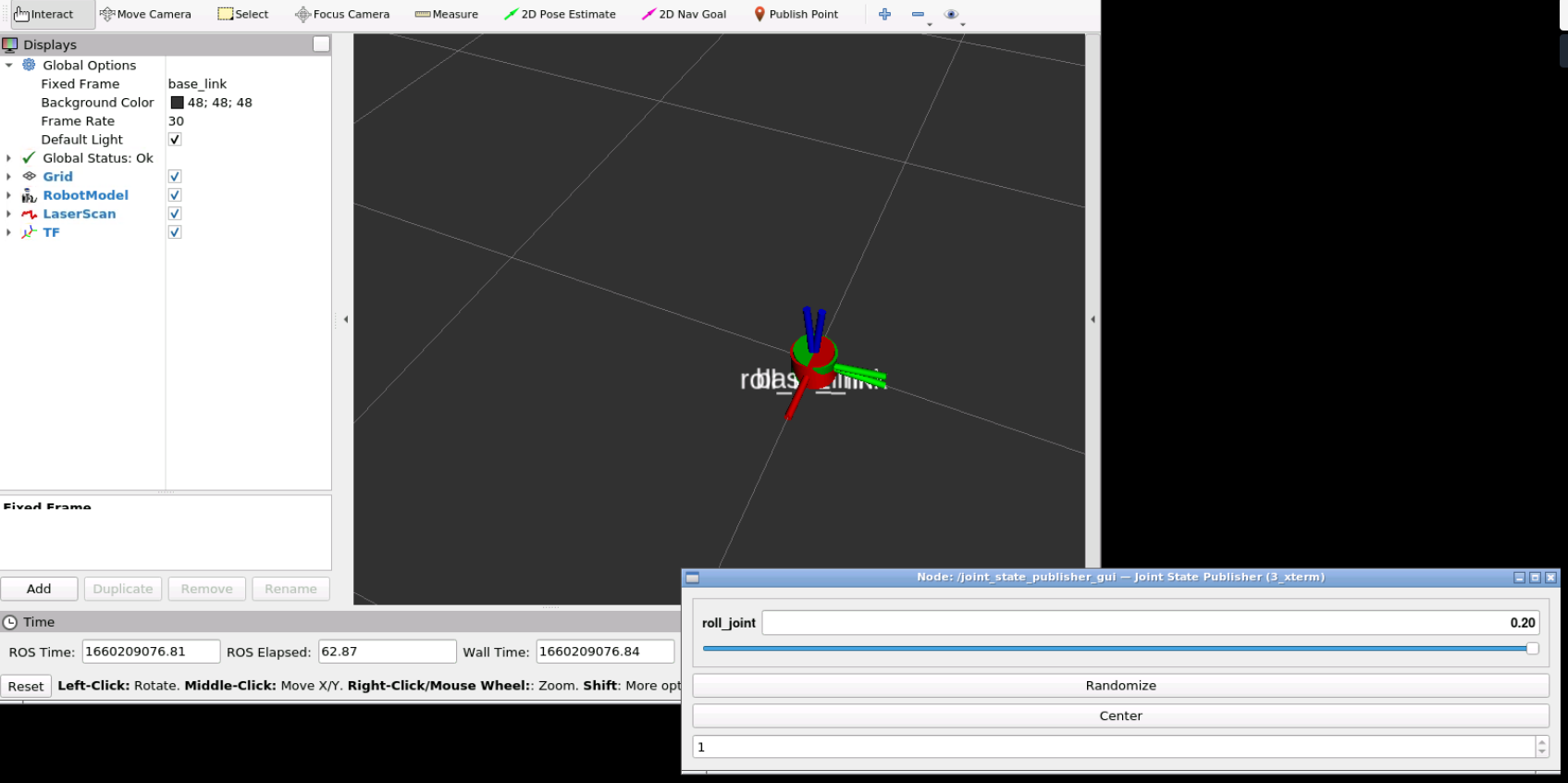
In the first example you should get something like this:
With this command:
roslaunch my_mira_description urdf_visualize.launch model:=‘$(find my_mira_description)/urdf/mira_simple.urdf’
With these files:
urdf_visualize.launch
<launch>
<!-- USE: roslaunch my_mira_description urdf_visualize.launch model:='$(find myrobot_package)/urdf/myrobot.urdf' -->
<arg name="model" default=""/>
<param name="robot_description" command="cat $(arg model)" />
<!-- send fake joint values -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui"/>
<!-- Combine joint values -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
<!-- Show in Rviz -->
<!--<node name="rviz" pkg="rviz" type="rviz" args="-d $(find my_mira_description)/rviz_config/urdf.rviz"/>-->
<node name="rviz" pkg="rviz" type="rviz" args=""/>
</launch>
mira_simple.urdf’
<?xml version="1.0"?>
<robot name="mira">
<material name="green">
<color rgba="0 0.8 0 1"/>
</material>
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
<material name="green"/>
</visual>
</link>
<link name="roll_M1_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
</visual>
</link>
<joint name="roll_joint" type="revolute">
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
</robot>
If you followed the instructions of the notebook you should be able to obtain this. Remember to change the fixed frame in RVIZ to base_link
Hi,
You have to add the robot model element, an the TF element in RVIZ. There is a button that says: ADD
There you have to add the element. I think that is explained in the notebook. You can also have a look at the section of debugging in ROS in 5 Days
This topic was automatically closed 10 days after the last reply. New replies are no longer allowed.