Hello,
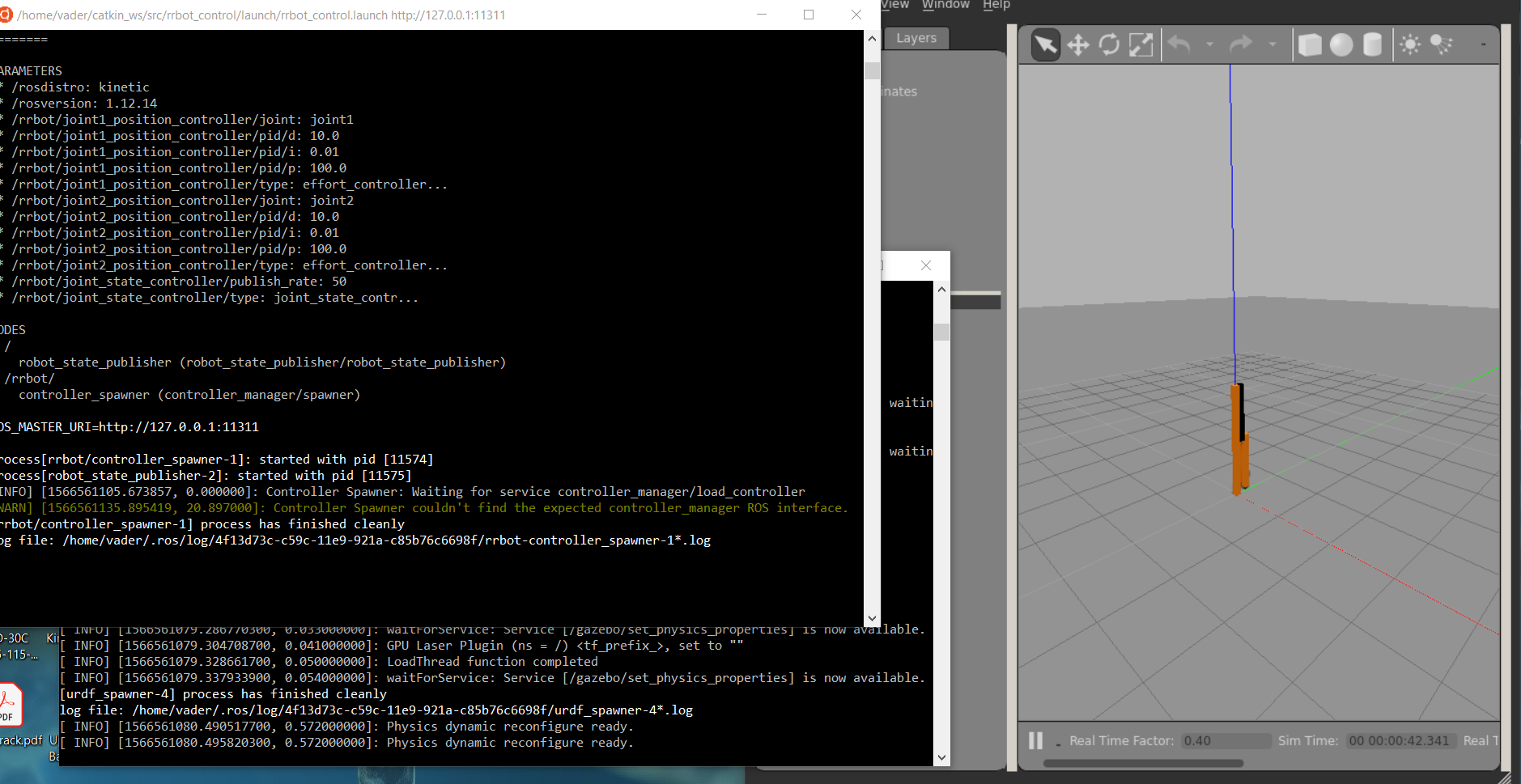
I completed the ROSControl101 course before successfully. Right now I am trying to write my own servo motor driver for ROS. For this, first I decided to try this course packages for better understanding. I downloded the rrbot_description, rrbot_control and rrbot_gazebo packages. I am using ROS Kinetic on Windows 10 WSL. When I try to launch rrbot_control, it throws “Controller Spawner couldn’t find the expected controller_manager ROS interface” warning. I checked everything but still can’t find the problem. Could you suggest me anything to check.
PS: I didn’t change the downloaded packages. So xacro and launch files have both same namespace which is rrbot. Also I am sure that all controll and gazebo packages are installed.
PS2: How I test it
roslaunch rrbot_gazebo main.launch -> this works fine
and then when I try following command
roslaunch rrbot_control rrbot_control.launch
I get Controller Spawner couldn’t find the expected controller_manager ROS interface
Thanks.