I think I did well but I cannot load the controller.
Can you check my source or pkg (project_controller?)
I really don’t have ideas
(I checked my cpp file for ur5 joint interface and yaml file for right name of controller)
I think I did well but I cannot load the controller.
Can you check my source or pkg (project_controller?)
I really don’t have ideas
(I checked my cpp file for ur5 joint interface and yaml file for right name of controller)
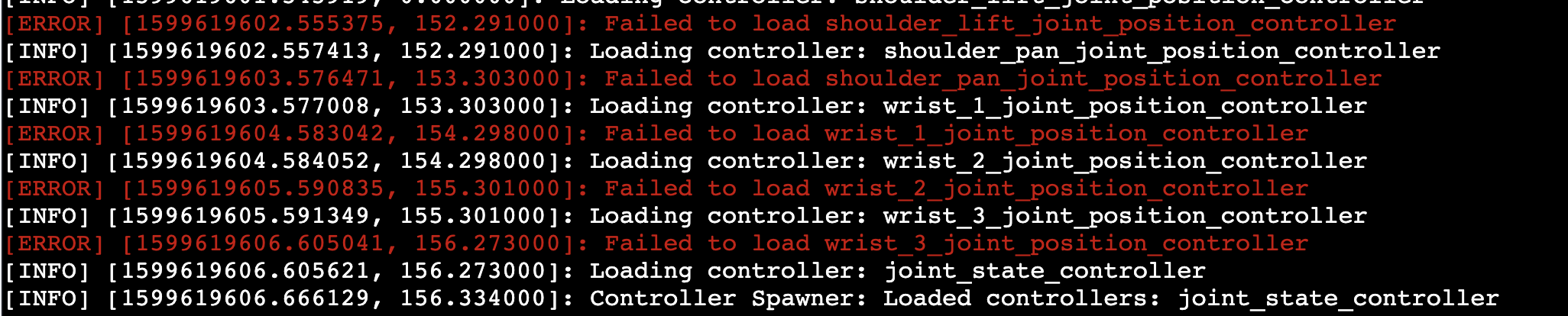
Hello @chanyang0719,
Did you manage to solve this issue? If not, what error are you getting? Could share an image of it?
Best,
Hey @chanyang0719, try looking in the ur5.urdf.xacro file for the ‘name’ of the joints you want to use in your yaml… I got stuck here as well and then went back at the ur_description hint from earlier in the quiz