Hi,
I have built my own robotic arm which is based off the robotis manipulator H. I have created a rosject specifically for this project and now I would like to connect this rosject to my arm and start controlling it. I am stuck trying to figure out how to make this connection.
I have found this: How to use Real Robot Connection in ROS Developement Studio - The Construct
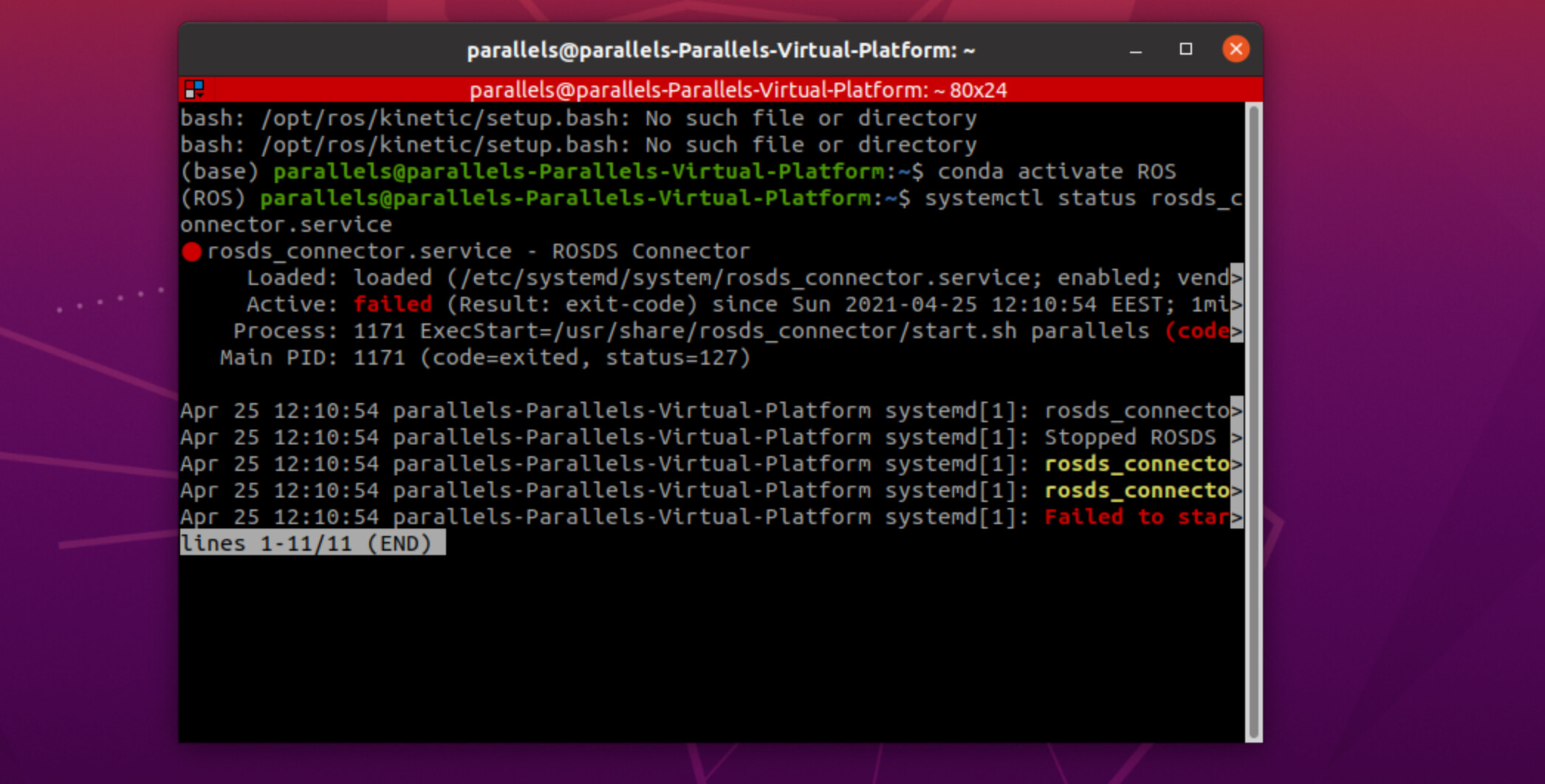
but when I try and follow the steps I am unable to activate the connection as shown in the picture.
I am also not sure how to make the robot connection from inside the rosject.
Any help would be greatly appreciated.
Hi,
So to connect form a Rosject to your real robots, you have to follow these steps:
- Create n OVPN server insid ethe Robots rms computer
- Get the config file and upload it to you ROsject
- Launchan ovpn client usin the config file inside the ROSject
You will probably have to set up some ports insid ethe Robots pc so that you can access. That depends on our local setup.
Hi Benjamin,
sorry but he post that you are indicating is outdated. We are building a better and simple solution for that connection which will be available in the next weeks (first alpha next Friday).
Apart from that, I answered you by email about how you can connect your local robot to the ROS Development Studio
Hi Ricardo,
Thanks very much for the help