Hello, I am currently doing ROS Basic in 5Days (C++).
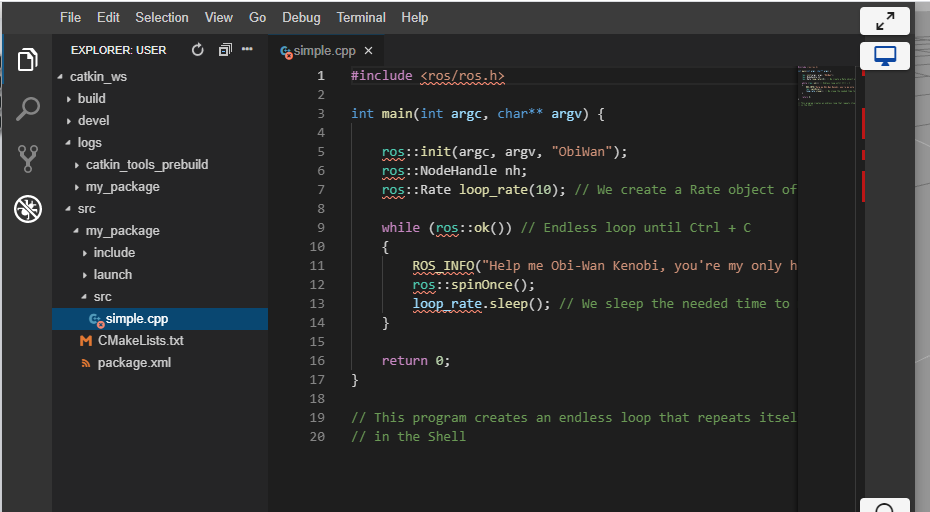
I am currently working on a task to execute the following sample code on a 1.8 ROS Node and check the ”rosnode list”.
In this sample code, INFO is supposed to loop infinitely, but it does not loop and is displayed only once.
The code is exactly the same as in the sample. The launch command is also the same.
Any advice would be appreciated.