Hi All,
this quote is not clear for me
“Note that the static_map parameter is set to False. This is because the local costmap is built from the laser readings, not from any static map”
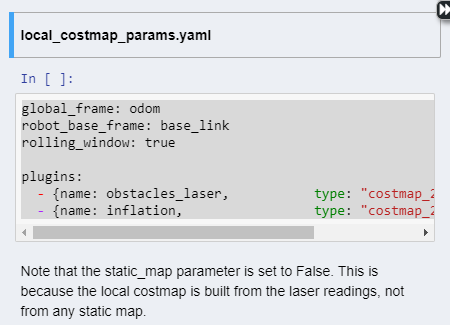
Although the sentence makes sense in the context of local planner but Where is False set here ? I do not see how the map is static except in the costmap_common_params.yaml in where it’s set to True by the way.
the same applies here:
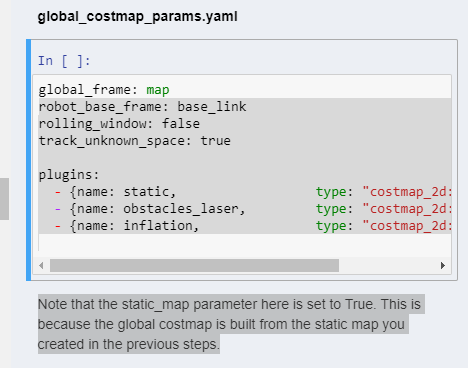
“Note that the static_map parameter here is set to True. This is because the global costmap is built from the static map you created in the previous steps.”
My guess is that for both quotes it refers to the “rolling window”.
in the global_costmap_params. yaml, the map is statically loaded as a global “reference” somehow and it makes sense that here the rolling window is set to False
But when the local_planner uses the segmented maps (provided by the global_planner, the sensor readings are done dynamically , thus the rolling window is set to true.
Can somebody clarify please?