Hi
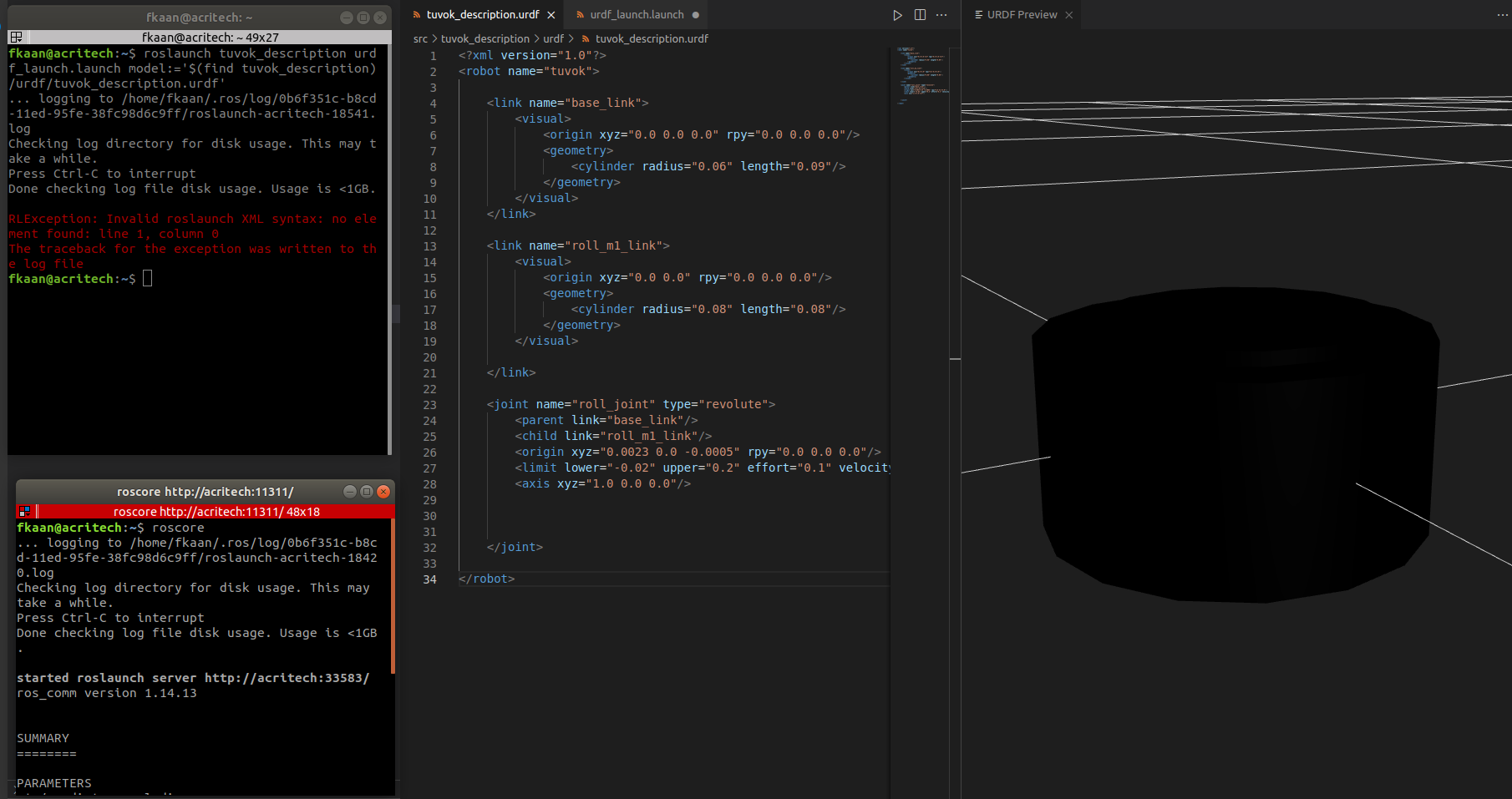
I trying to do URDF at my local (ubuntu 18.04/ melodic) I can see the shape of the robot like below image but I am having trouble while launching the urdf launch file.
As I understand there is no problem in XML file since I can see it in urdf preview and my launch file same as in the tutor. What can be the problem ? Thanks
Indeed, it looks like an error with the launch file taking into account what the error message says. Even though the URDF file looks correct (therefore you can previsualize it), the launch file could be wrong. Could you share here the contents of your launch file?
@fkaan Because in the setup used in the Academy, it’s not needed. The courses are tested in the Academy, so replicating them on each person’s local computer might need extra steps.
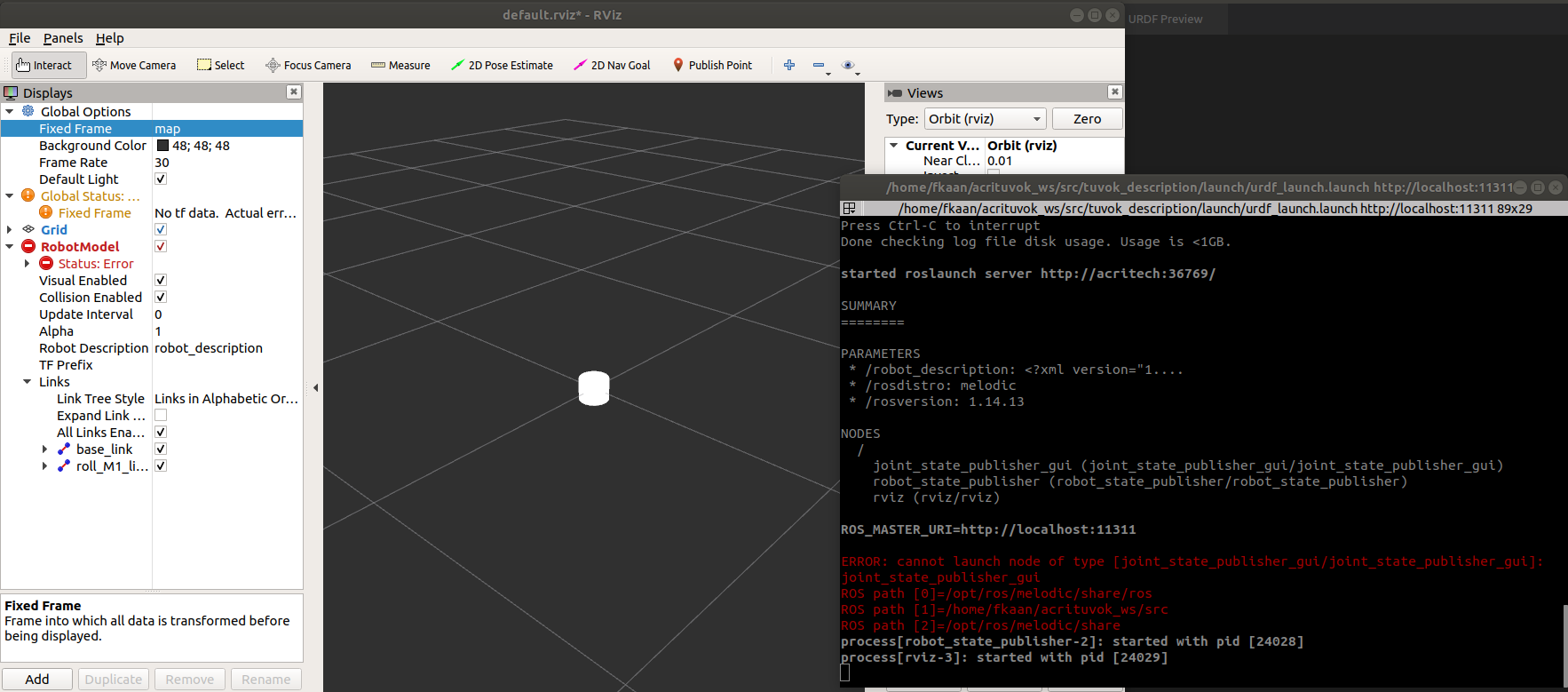
For instance, the error in the image appears because you don’t have installed the joint_state_publisher_gui package (which is already installed in the Academy). Probably it will get solved by installing it like this: