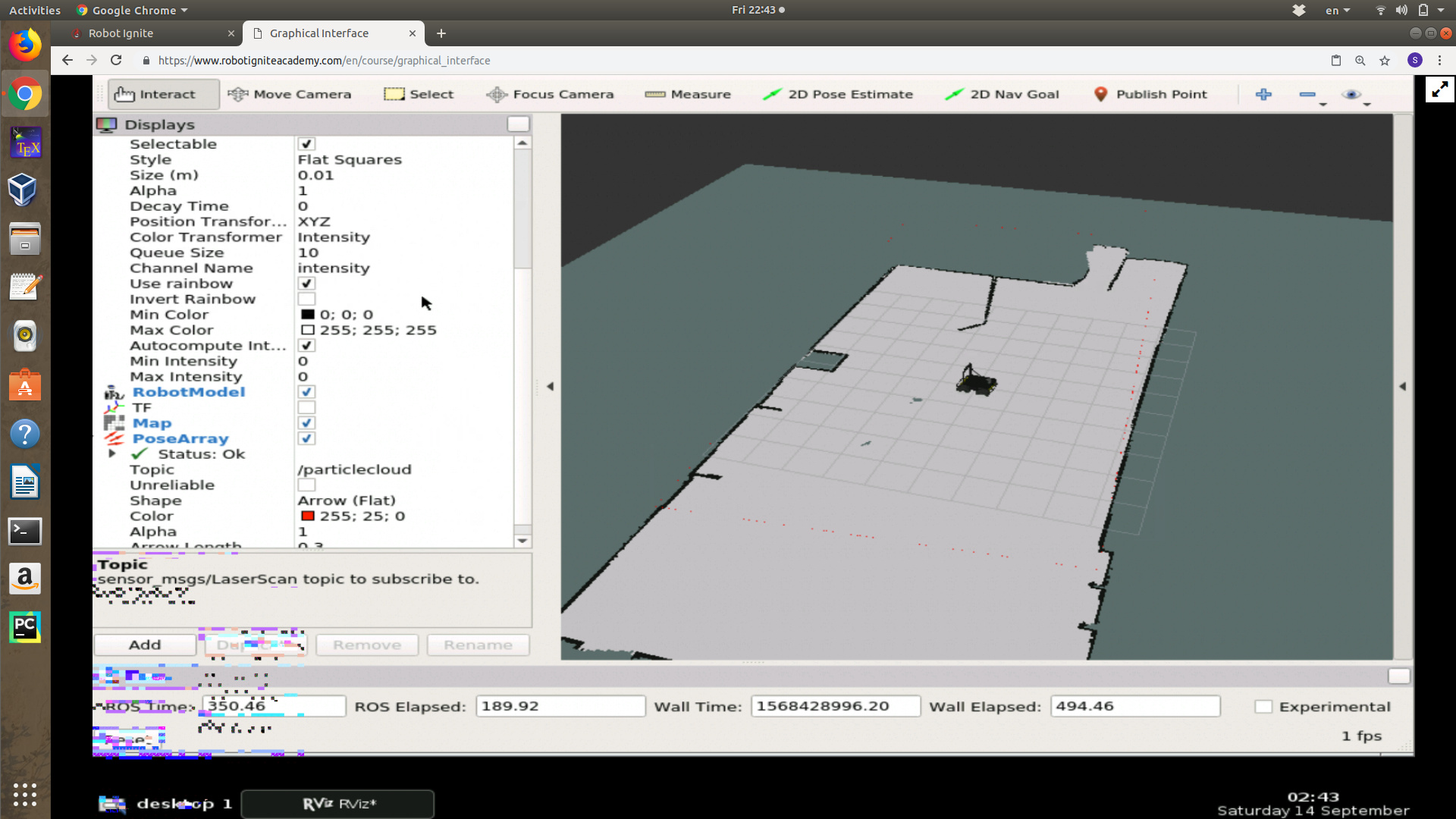
I am doing the ros navigation in 5 days tutorial, and I am now at chapter 3. Trying to do exe 3.1, I can’t RVIZ to show me the robot’s particle clouds (screenshot attached).
I made sure rviz is listening the right topic (/particlecloud) - I also made sure messages are being published to this topic. I turned the system on and off several times.
Some questions to debug the problem:
1- Which value do you have at the Fixed frame?
2- Is the robot correctly localised? I mean, if you press on 2D Pose Estimate and provide a position to the robot in the map that corresponds to the actual position of the robot in the environment, does the robot position itself at that location on Rviz? Furthermore, if you move the robot in the simulation using the keys or publishing on the /cmd_vel topic, does the robot also move properly on the rviz?
3- Final question, if you click on the Status: OK of the PoseArray does it show that the topic is receiving messages on that topic?