Dear All,
I am very new in this area. I was tryining to train my turtlebot3 robot to recognize my custom gazebo env using slam. I am following the below link to do the same.
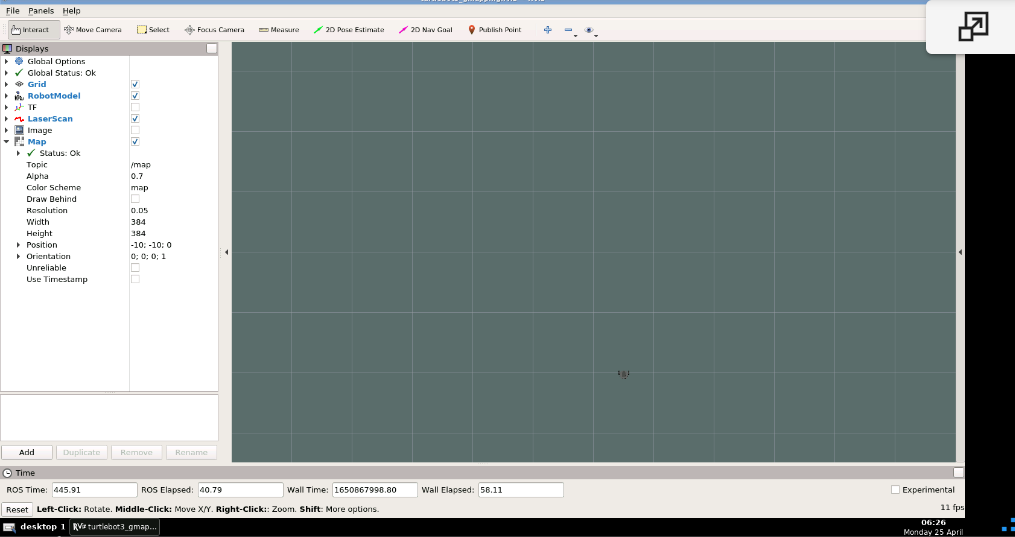
I was successfully bring the default Gazebo env (Hexagonal green maze), But If I insert new Kitchen Dinning model my rviz is showing blank world with the robot.
Please check the screen shot.
Hi @uttpaul ,
Could you share your rosject?
This is the best way to see what could be missing in your environment
Hi @uttpaul,
Rviz is used to visualize what is happening in either the simulation (gazebo) or the real world. It is normal to not see a model apart from the robot. If you correctly set the sensors (i.e. camera or laserscan) you can see if the robot is detecting something from gazebo. My guess is that in your screenshot, the simulation does not have any models apart from the robot so that is why you don’t see anything.
What do you mean when you say:
But If I insert new Kitchen Dinning model my rviz
Are you deleting the maze world in gazebo and manually adding the kitchen dining model? Just so you know, there are more default launches that come in the TurtleBot3 simulation git:
All you need to do is change the turltebot3_world.launch file in the command roslaunch turtlebot3_gazebo turtlebot3_world.launch
1 Like