So have multiple issues.
I have followed the instructions and have copied and pasted the urdf file and launch file. I am stuck trying to visual the model.
<?xml version="1.0"?><link name="roll_M1_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
</visual>
</link>
<joint name="roll_joint" type="revolute">
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
<param name="use_gui" value="TRUE"/>
When I execute : roslaunch my_mira_description urdf_visualize.launch model:=’$(find my_mira_description)/urdf/mira_simple.urdf’
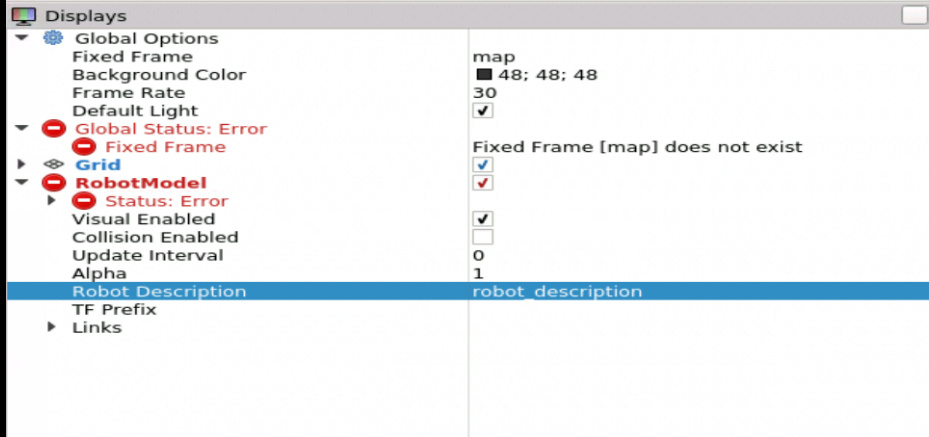
I go the rviz window and I have an error Global Status Error: Fixed frame does not exist.
Second trying to follow the instructions:
- RobotModel: In this case, just select the robot_description variable for the RobotDescription field .
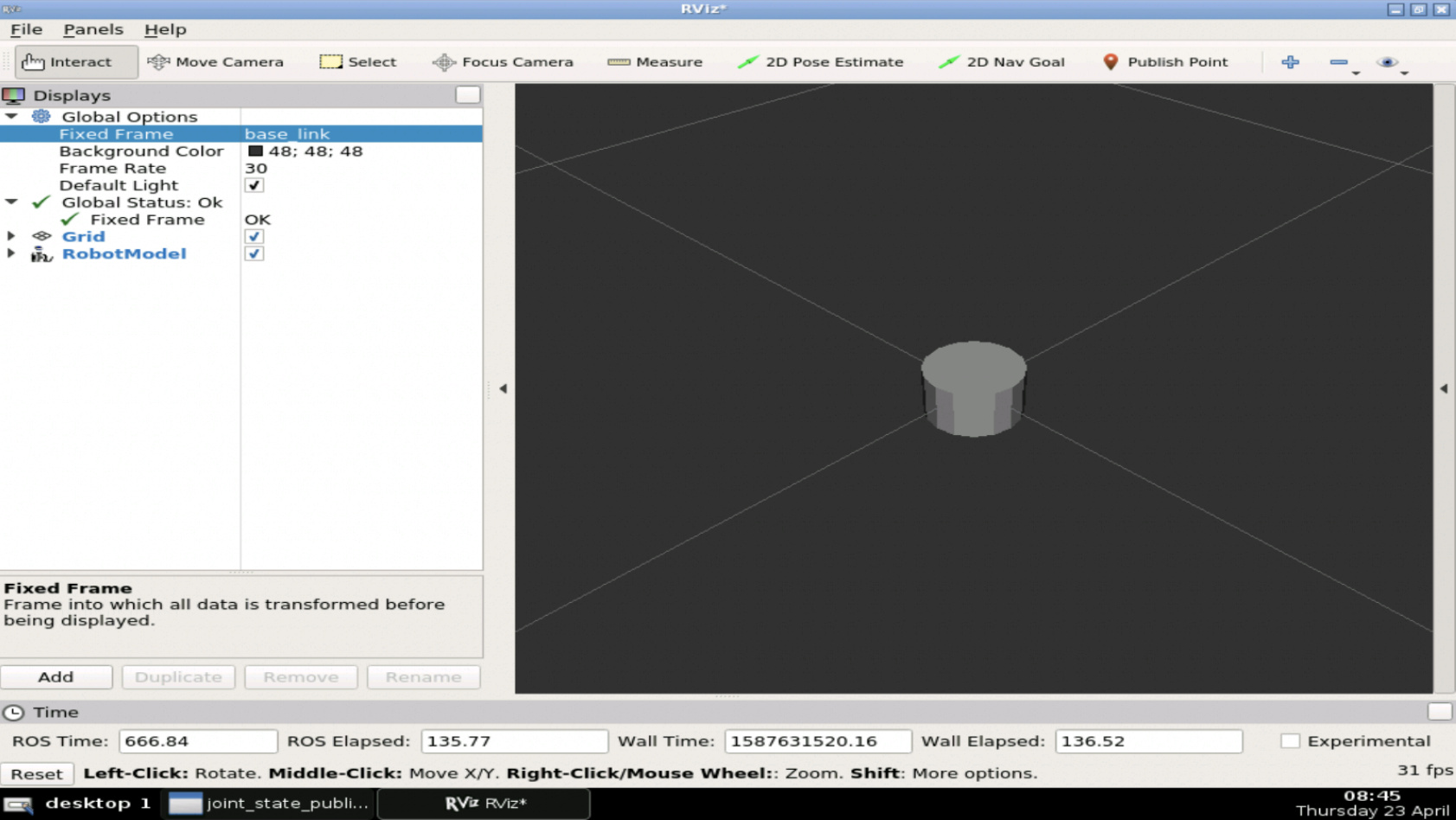
- TF: It will turn green as soon as you select the correct fixed frame , in this case base_link .
When I select that I get an error