| course | TF ROS2 |
|---|---|
| unit | BroadCast & Listen to TF data |
Screenshot of the error
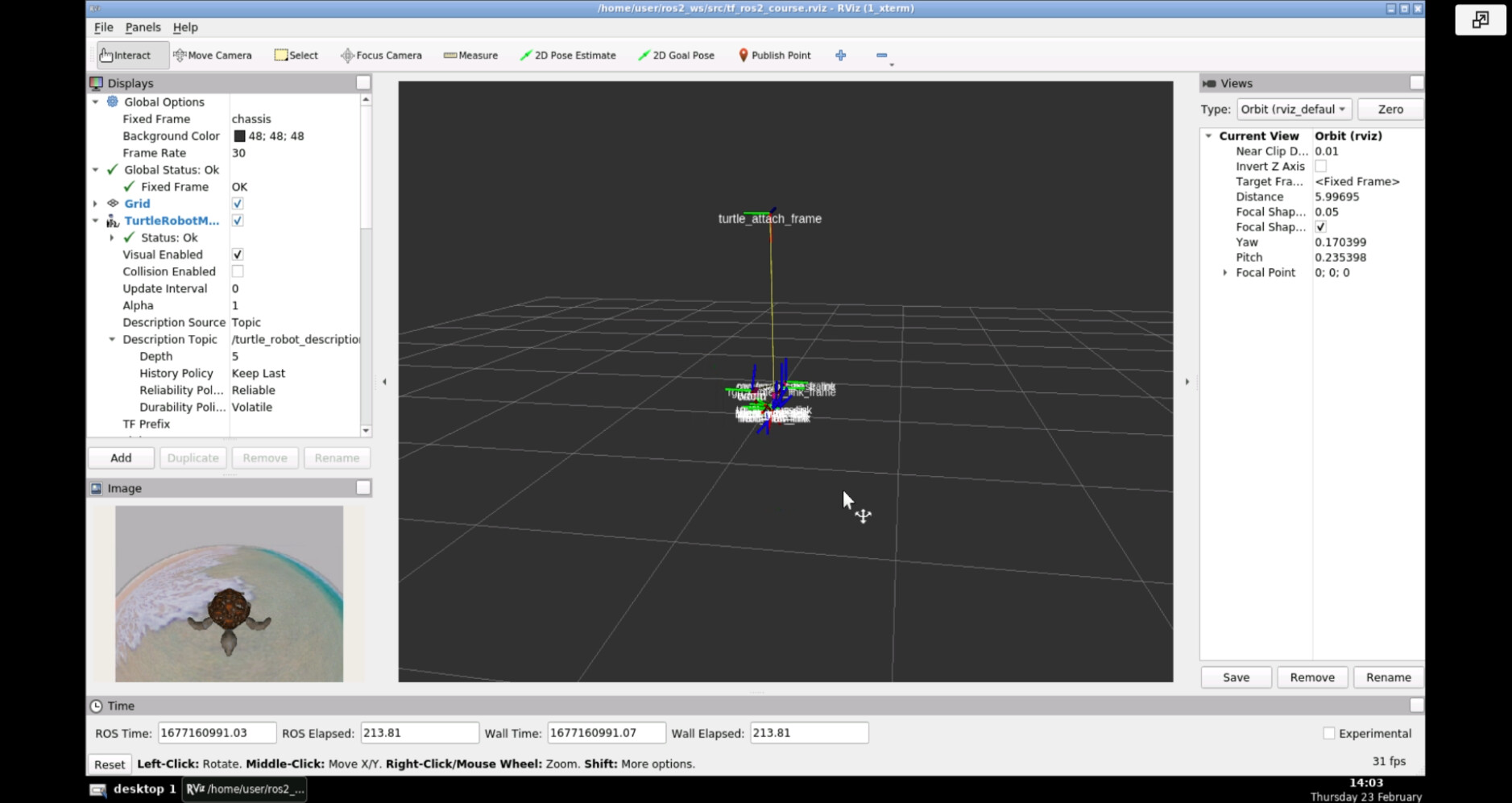
Error details
The command ros2 run tf2_ros tf2_monitor camera_bot_base_link rgb_camera_link_frame Gives a different output than suggested. [ERROR] [1677159905.646523857] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae]: Unable to open file “package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae”. [ERROR] [1677159905.646730379] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703) [ERROR] [1677159905.646964206] [rviz2]: could not load model ‘package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae’ for link ‘turtle_chassis’: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703) [ERROR] [1677159905.647320246] [rviz2]: Could not load resource [package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae]: Unable to open file “package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae”. [ERROR] [1677159905.647404822] [rviz2]: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703) [ERROR] [1677159905.647484663] [rviz2]: could not load model ‘package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae’ for link ‘turtle_chassis’: FileNotFoundException: Cannot locate resource package://turtle_tf_3d_ros2/meshes/turtle/turtle.dae in resource group OgreAutodetect. in ResourceGroupManager::openResource at /tmp/binarydeb/ros-galactic-rviz-ogre-vendor-8.5.0/obj-x86_64-linux-gnu/ogre-v1.12.1-prefix/src/ogre-v1.12.1/OgreMain/src/OgreResourceGroupManager.cpp (line 703)