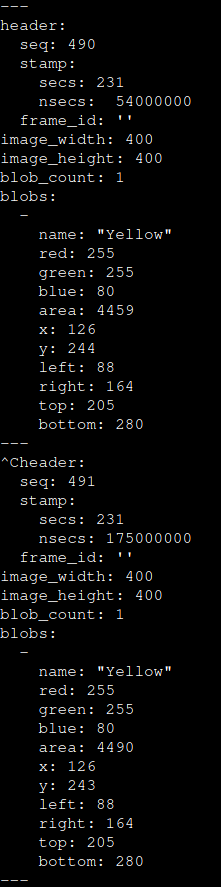
I am working on the perception module in unit 2 in preparation of exercise U1-2. I manage to get the red ball in the field of view of the robot, I can use the GUI to get the RBG and the YUV values. When I fill them into my colors.txt, the detection algorithm doesn’t recognize them correctly. In the best case scenario, it recognizes the red ball as yellow. When I use the default values in the notebook or my own values, it doesn’t show the red color.
Maybe for some reason it was getting the yellow first. I would try to just place the RedBall colour an then add other colours and see if that’s the issue.