Hello!
DH parameters (alpha i, a i, theta i, d i) have same meaning as (alpha i-1, a i-1, theta i, di)? some books uses
first notation, i is actually no of joints…kindly clarify this.
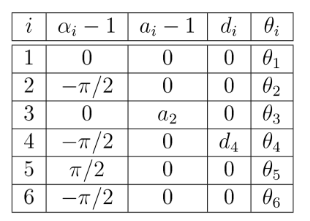
2ndly in DH table given the value of alpha for joint 2 will be -pi??? given in table -pi/2…clear this too please.
Thanks
Hi,
So:
-
(alpha i, a i, theta i, d i) have same meaning as (alpha i-1, a i-1, theta i, di), don’t have the exact same meaning. In theory , the i means the current_joint. i-1 is the previous one. But yeah dependinging on who , this is used one way or another. The important part is that you are coherent when you use it in the DH method.
-
Joint 2 has alpha= -pi/2, not pi. I don’t quite understand what are you stating then?
Thanks for your reply.part 1 is clear that these parameters depends on the method we are using .
In part 2 it is not clear why alpha =-pi/2? as when we move the joints using joint_state_controller in Rviz the joint 2 move between 0 and pi what i understood, then how it is -pi/2, may be i am wrong so correct me please.
thanks
Hi,
Thes eparatemers are not related to the joints movements , but the frames respect the previous one.
You can have some range of values in the rqt joint state but then have another value… It really has nothing to do one thing with the other
thank you duckfrost for ur reply.
This topic was automatically closed after 20 hours. New replies are no longer allowed.