I used the xyz and rpy values for the joints’ origin tags as described in the Link Tree.
The following is my Link Tree, which was generated based on my urdf file:
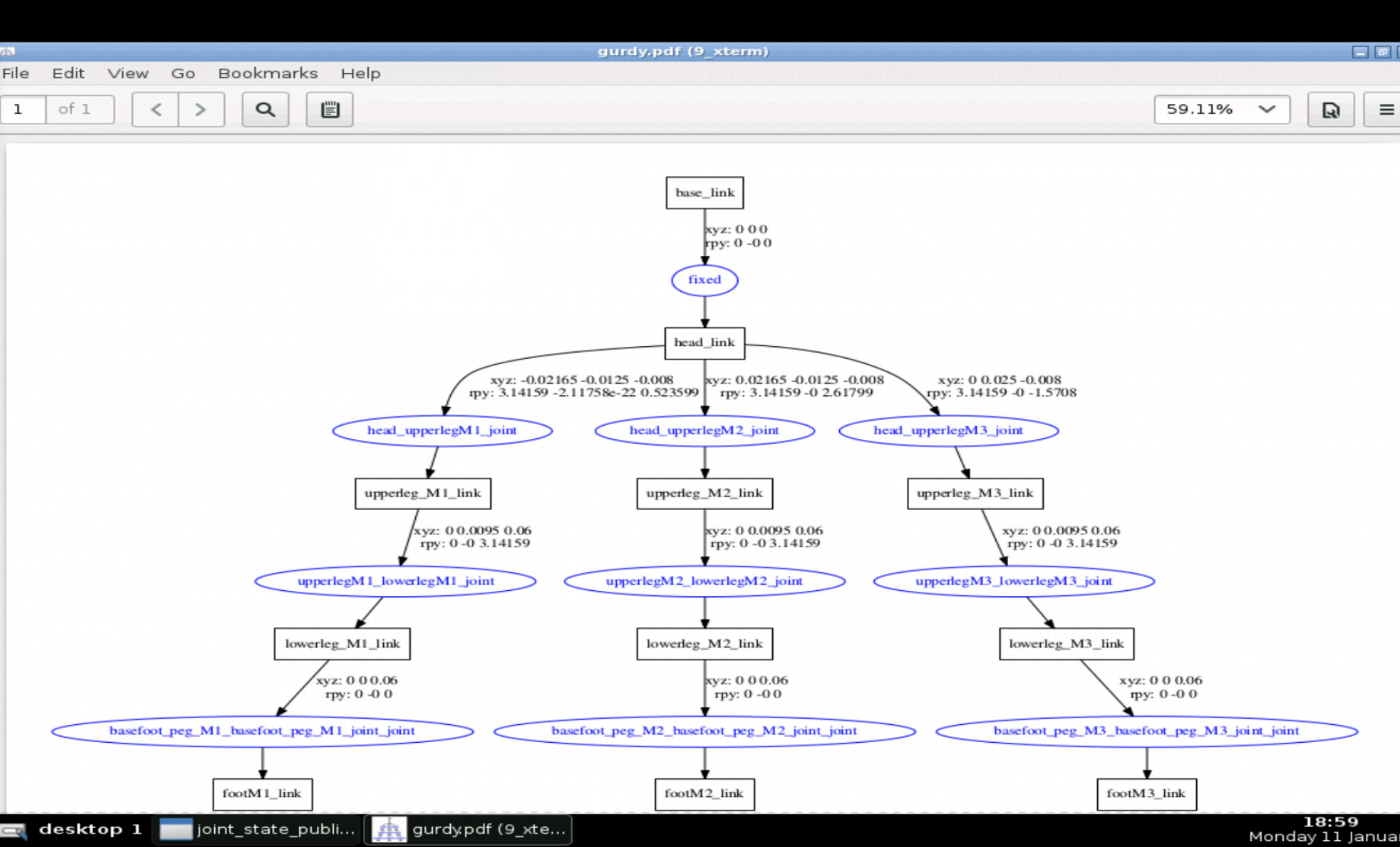
This is the given Link Tree:

However when checking with RVIZ how is Gurdy shaped, this is what I get:
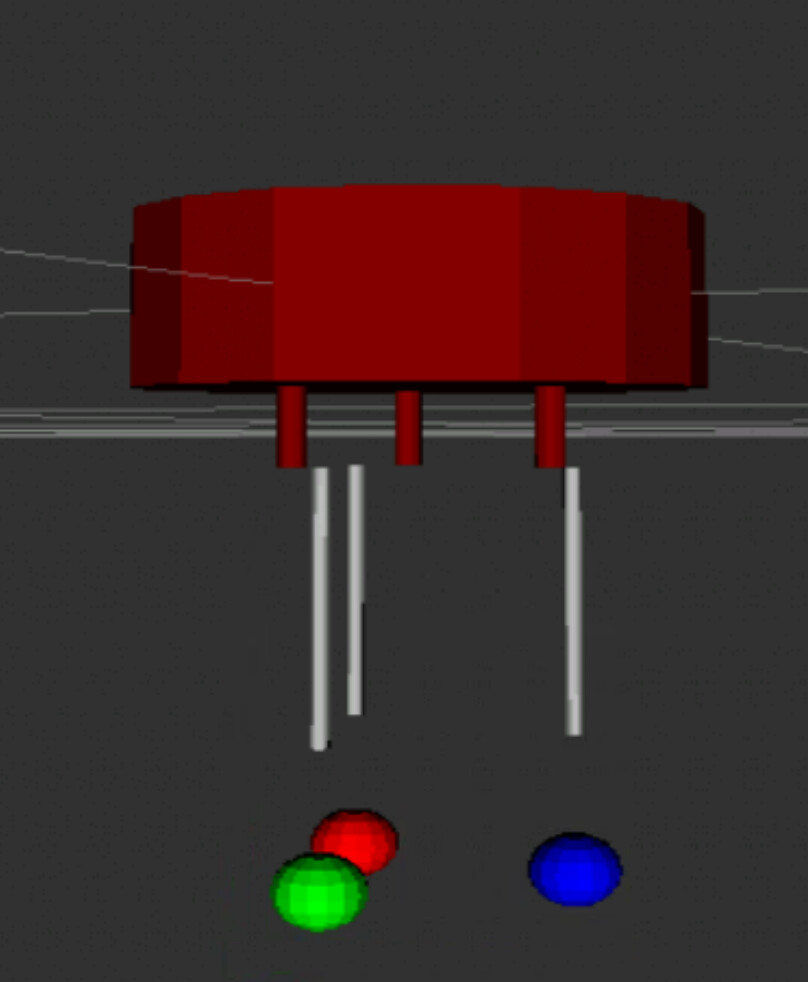
This doesn’t look correct to me.
P.S. Could we use something more intuitive as a name for the joints linking the foot and lowerleg links, like lowerlegM1_footM1_joint instead of basefoot_peg_M1_basefoot_peg_M1_joint_joint?
Thank you.