I have created a new version of Gurdy with xacro. Converted for the urdf…and it was appearing in Gazebo…it was well generated…
I have added a diff-drive plugin in order to make it walk with cmd_vel topic, as asked in exerice 1 from U3-3. And it worked the first time (not good because the robot was lying on the floor, but MOVED in the direction I desired). But now even the meshes are not loaded…don’t know why ( I delete and copy to gazebo as recommended…)
In this way I have adapt the move_gurdy.py script you have given as an example in the end of the lesson to my gurdy_version adding and renaming the topics…in order to fit with my new ns of the robot…
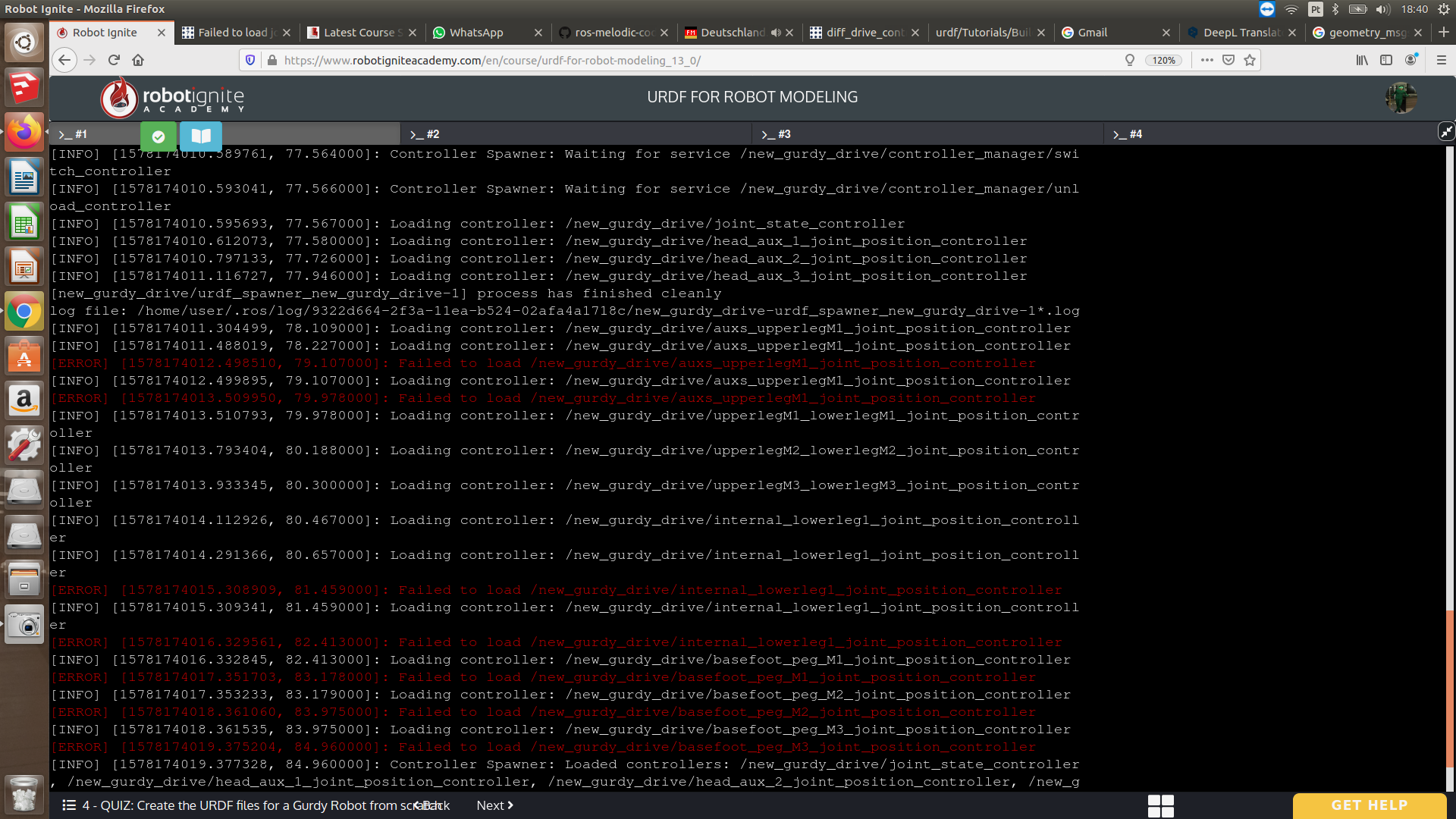
The fact is that I could not try to use this script to work with my model…because for some reason the controls are not launched. In this I share with you my alternative_gurdy version Package is in this link (github):
https://github.com/marcusvinicius178/marcus_ws/tree/master/new_gurdy_version_description.
If one of you could help me…I will be very grateful. I am exciting to see Gurdy makes magic!
the launch file is : spawn_new_gurdy_drive.launch
and my the script I want to test is: juggle_new_drive_gurdy.py
I accept good hints to finish U3-3 exercise faster (I am a little late )
)
Thanks in advance.