hi
i am going thrue this course, and am trying to get good marks while i am at it, but this is what the alghoritm sys:
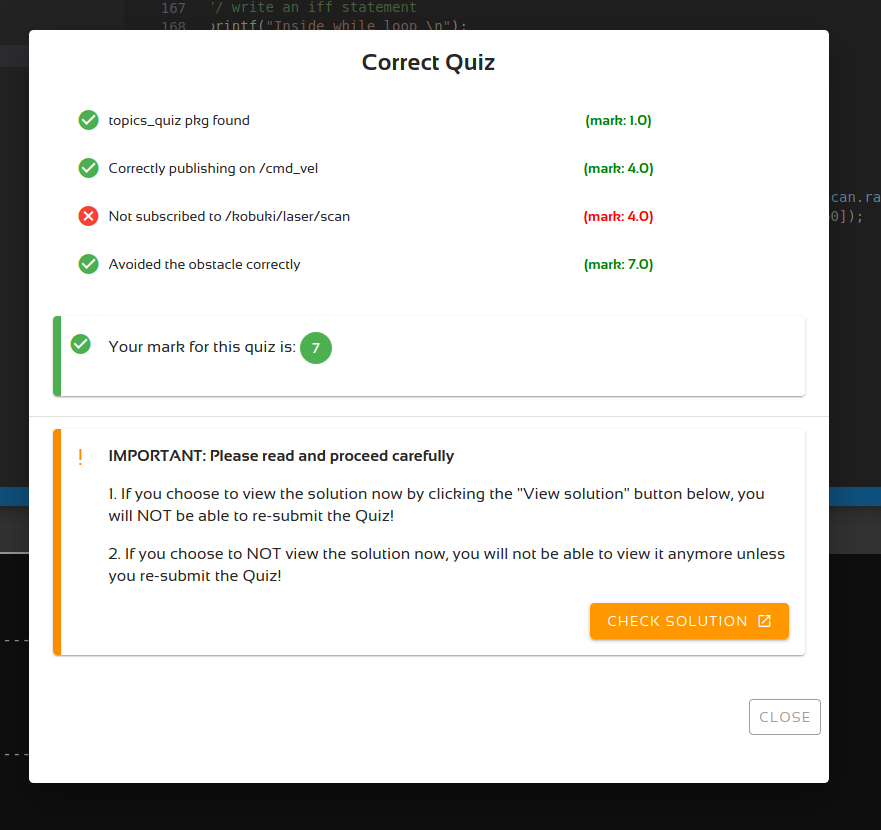
and this is the code:
#include <ros/ros.h>
#include <nav_msgs/Odometry.h>
#include <geometry_msgs/Twist.h>
#include <sensor_msgs/LaserScan.h>
#include <signal.h>
#include <list>
#include <vector>
#include <string>
#include <iostream>
using namespace std;
class RobotControllClass{
public:
nav_msgs::Odometry odom;
geometry_msgs::Twist cmd;
sensor_msgs::LaserScan::ConstPtr laser_scan_pointer;
sensor_msgs::LaserScan laser_scan;
ros::Publisher pub;
ros::Publisher pub_laser;
ros::Subscriber sub_laser;
ros::NodeHandle nh;
int counter;
void publish_laser_scan_info();
RobotControllClass(ros::NodeHandle *outside_nh){
nh = *outside_nh;
pub = nh.advertise<geometry_msgs::Twist> (nh.resolveName(vel_topic), 1000);
pub_laser = nh.advertise<sensor_msgs::LaserScan> (nh.resolveName(laser_topic_test_publish), 1000);
sub_laser = nh.subscribe(nh.resolveName(laser_topic_test), 1000, &RobotControllClass::laser_callback_number, this);
initializer_function();
}
void avoid_the_wall();
void stop_robot();
void cmd_publish_once();
void test_write();
void avoid_the_wall_2();
private:
int internal_rate = 15; //refresh rate to wait for sensor data to get initialized
int counter_i =0 ;
const string vel_topic = "/cmd_vel";
const string odom_topic = "/odom";
const string laser_topic_test = "/kobuki/laser/scan";
const string laser_topic_test_publish= "/laser_publish";
void laser_callback_number(const sensor_msgs::LaserScan &msg);
void initializer_function();
};
void RobotControllClass::laser_callback_number(const sensor_msgs::LaserScan &msg){
laser_scan = msg;
}
void RobotControllClass::initializer_function(){
ros::Rate rate_internal(internal_rate);
ROS_INFO("starting initilaizer function");
while (laser_scan.ranges.empty()){
ROS_INFO("Waiting for [%s] to started publishing", laser_topic_test.c_str());
ros::spinOnce();
rate_internal.sleep();
}
ROS_INFO("%s started publishing", laser_topic_test.c_str());
}
void RobotControllClass::publish_laser_scan_info(){
ros::Rate rate_internal(internal_rate);
int i;
while(ros::ok()){
printf("data at sensor 360= %f \n", laser_scan.ranges[360]);
counter_i++;
printf("counter = %i \n", counter_i);
ros::spinOnce();
rate_internal.sleep();
}
}
void RobotControllClass::avoid_the_wall(){
ros::Rate rate_internal(15);
stop_robot();
printf("starterted moving\n");
while (laser_scan.ranges[360] > 1){
cmd.linear.x = 0.25;
cmd_publish_once();
printf("distance: %f \n", laser_scan.ranges[360]);
ros::spinOnce();
rate_internal.sleep();
}
while (laser_scan.ranges[0] > 1){
cmd.angular.z = 0.8;
cmd.linear.x = 0.25;
cmd_publish_once();
printf(" distance to the right side : %f \n", laser_scan.ranges[0]);
ros::spinOnce();
rate_internal.sleep();
}
stop_robot();
cmd.angular.z = 0.8;
cmd_publish_once();
printf(" distance to the right side : %f \n", laser_scan.ranges[0]);
sleep(1);
stop_robot();
while ((laser_scan.ranges[0] < 30) or (laser_scan.ranges[360] < 30)){
printf("avoided the wall: %f \n", laser_scan.ranges[0]);
cmd.linear.x = 0.25;
cmd_publish_once();
ros::spinOnce();
rate_internal.sleep();
}
stop_robot();
}
void RobotControllClass::stop_robot(){
cmd.linear.x = 0;
cmd.linear.y = 0;
cmd.linear.z = 0;
cmd.angular.x = 0;
cmd.angular.y = 0;
cmd.angular.z = 0;
cmd_publish_once();
}
void RobotControllClass::cmd_publish_once(){
ros::Rate rate_internal(internal_rate);
int i;
while(ros::ok()){
i = pub.getNumSubscribers();
if (i >0){
//printf ("numbver of subscribers is: %i, \n", i);
pub.publish(cmd);
break;
}
else{
ROS_INFO("no connections to [%s] topic", vel_topic.c_str());
ros::spinOnce();
rate_internal.sleep();
}
}
}
void RobotControllClass::test_write(){
printf(" values from laser.ranges %f \n", laser_scan.ranges[12]);
}
void RobotControllClass::avoid_the_wall_2(){
ros::Rate rate_internal(1);
float speed_x = 0.25;
float speed_z = 0.8;
stop_robot();
bool variable;
variable = !((laser_scan.ranges[0] < 20) and (laser_scan.ranges[719] < 20) and (laser_scan.ranges[360] < 20));
cout << variable << endl;
while (ros::ok()){
// write an iff statement
printf("Inside while loop \n");
printf("laser range [360 = %f \n", laser_scan.ranges[360]);
if (laser_scan.ranges[360] > 1){
printf("FORWARD laser range [360 = %f\n", laser_scan.ranges[360]);
printf("laser_scan.ranges[360] > 1)\n");
cmd.linear.x = speed_x;
cmd.angular.z = 0;
cmd_publish_once();
}
else if ((laser_scan.ranges[360] < 1) and !(laser_scan.ranges[0] < laser_scan.ranges[719])){
printf(" FORWARD RIGHT laser range [360 = %f \n", laser_scan.ranges[360]);
printf("laser_scan.ranges[360] > 1)\n");
cmd.linear.x = speed_x;
cmd.angular.z = speed_z;
cmd_publish_once();
}
else if (laser_scan.ranges[719] < 1){
printf(" LEFT laser range [719 = %f\n", laser_scan.ranges[0]);
printf("laser_scan.ranges[719] < 1) \n");
cmd.linear.x = 0;
cmd.angular.z = speed_z;
cmd_publish_once();
}
else if (laser_scan.ranges[0] < 1){
printf(" RIGHT laser range [0 = %f\n", laser_scan.ranges[0]);
printf("laser_scan.ranges[0] < 1)\n");
cmd.linear.x = 0;
cmd.angular.z = -speed_z;
cmd_publish_once();
}
else{
printf("FORWARD LEFTlaser range [360 = %f \n", laser_scan.ranges[360]);
printf("laser_scan.ranges[360] > 1)\n");
cmd.linear.x = speed_x;
cmd.angular.z = -speed_z;
cmd_publish_once();
}
ros::spinOnce();
rate_internal.sleep();
printf("------------------------------------------------------ \n");
variable = (!(laser_scan.ranges[0] < 20) and !(laser_scan.ranges[719] < 20) and !(laser_scan.ranges[360] < 20));
cout << "VARIABLE IS: " << variable << endl;
printf("OUTSIDE BREAK STATEMENT \n");
printf("0 = %f %i \n", laser_scan.ranges[0], (laser_scan.ranges[0] < 20) );
printf("360 = %f %i \n", laser_scan.ranges[360], (laser_scan.ranges[360] < 20) );
printf("719 = %f %i \n", laser_scan.ranges[719], (laser_scan.ranges[719] < 20) );
printf("------------------------------------------------------ \n");
if (((laser_scan.ranges[0] < 20) and (laser_scan.ranges[719] < 20) and (laser_scan.ranges[360] < 20))){
variable = !((laser_scan.ranges[0] < 20) and (laser_scan.ranges[719] < 20) and (laser_scan.ranges[360] < 20));
cout << "VARIABLE IS: " << variable << endl;
printf("breaking the loop \n");
printf("0 = %f %i \n", laser_scan.ranges[0], (laser_scan.ranges[0] < 20) );
printf("360 = %f %i \n", laser_scan.ranges[360], (laser_scan.ranges[360] < 20) );
printf("719 = %f %i \n", laser_scan.ranges[719], (laser_scan.ranges[719] < 20) );
break;
}
}
printf("outside while loop \n");
stop_robot();
}
int main (int argc, char** argv){
ros::init(argc, argv, "topics_quiz_node");
ros::NodeHandle nh;
ROS_INFO("ros beeing started");
RobotControllClass st10(&nh);
ros::Rate rate(1);
//st10.test_write();
st10.avoid_the_wall_2();
//st10.publish_laser_scan_info();
//st10.avoid_the_wall();
ros::spinOnce();
}
//geometry_msgs nav_msgs roscpp std_msgs sensor_msgs