Hi i tried this quiz and i am getting really frustrated because i can’t find the solution to the probelm.
according to the make and the linter it says goal is not
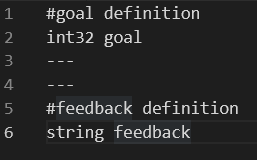
because at first i thought it was something with string so i changed the custom action to
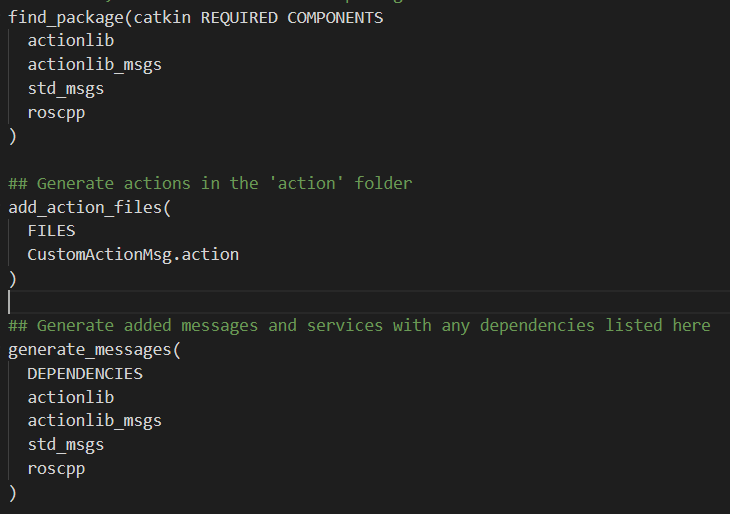
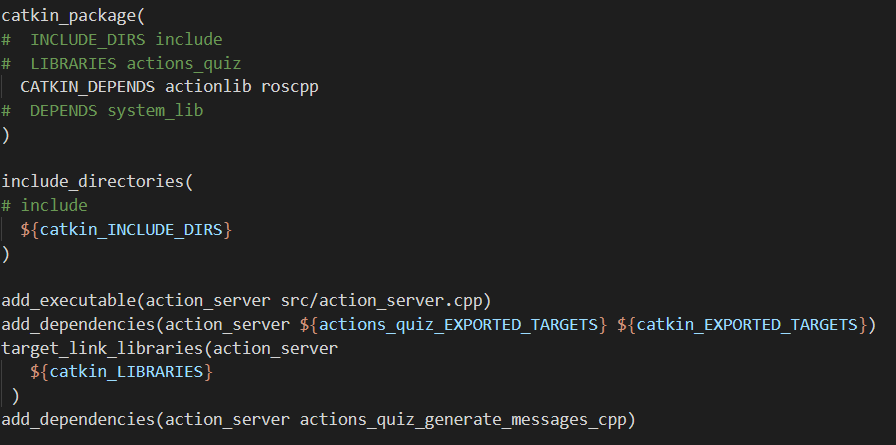
here are my c code, xml and make file if someone knows the answer pleas let me know.
am i doing something wrong or what is the case here.
might be a stupid question but i just don’t get it.
looking forward to your response
best regards
Joni0131
goal should be string , and u just have to check whether the input goal is equal to the condition .
i.e if goal == ‘TAKEOFF’:
(block of code to be executed if the condition is true)
I think it should have been a string instead of int32 since the quiz wanted us to send “TAKEOFF” or “LAND” from our action client, and using int32 wont solve it.
Yeah i know but the same error occurd when using string so i thought maybe i can unsderstand it better when using int32 as in the fibonacci example
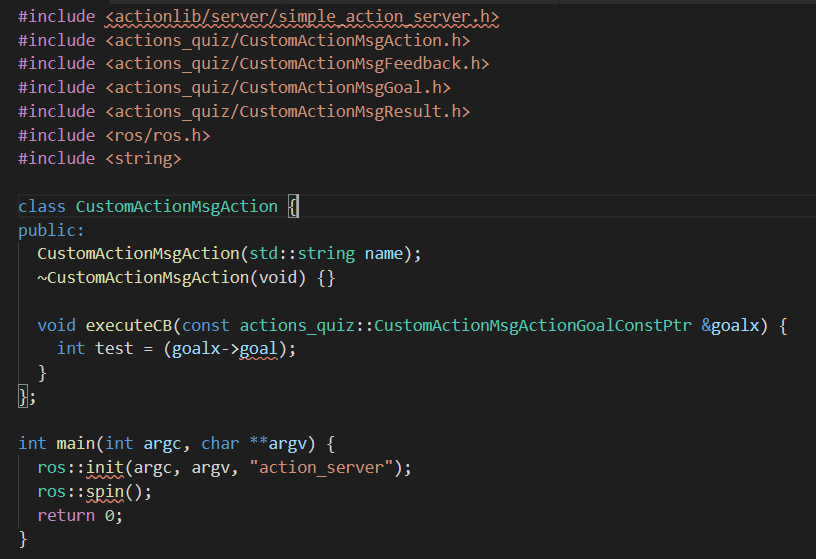
I saw this but because i was getting the same error for a string i tried to reduce my code to the minimum so it can compile but it still is not working so i asked if someone has a reaso for ther error that occurse when compiling the c code here as seen in the first picture
To be fair, I am still new to C++, but from what I understand from your program is that you have not even initiated any action server yet? You should create an object of type CustomActionMsgAction. Maybe the following should solve the issue?
int main(int argc, char **argv) {
ros::init(argc, argv, "action_custom_msg_as");
CustomActionMsgAction customAction("/action_custom_msg_as");
ros::spin();
return 0;
}
Also, in order for it to work, you need to create your constructor. Something along this line.
customActionMsgAction(std::string name)
: action_server_(nh_, name,
boost::bind(&customActionMsgAction::executeCallback, this, _1),
false),
action_name_(name) {
action_server_.start();
}
The constructor will start your action server and you should be able to check if your action server is up and running with
rostopic list | grep <insert_your_action_server_name>