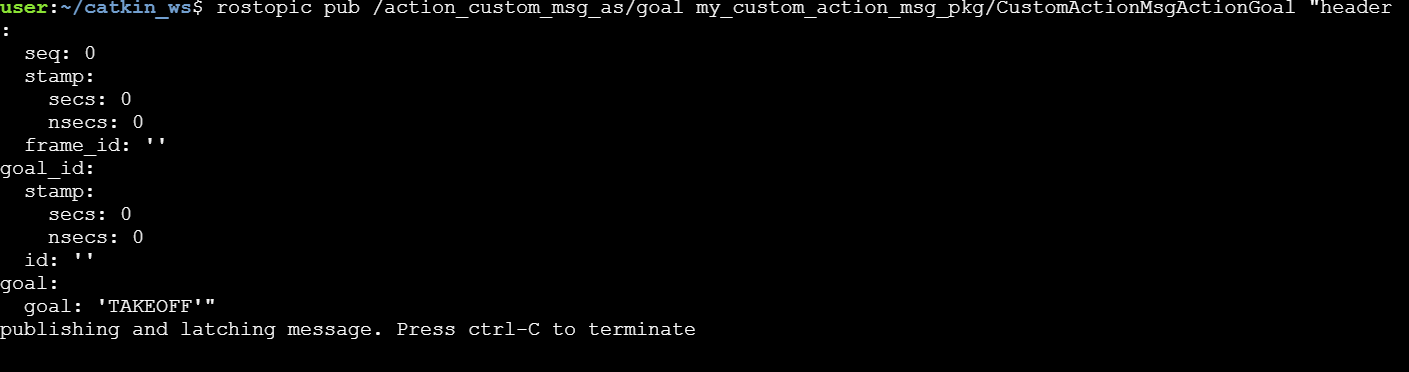
Hello All, I got an error message for the actions quiz as shown below. I can successfully launch the server.launch file and use rostopic pub to send goal by TAB+TAB. The error I got is right after hitting the TAB+TAB. And I attach my server code as shown below. Appreciate anyone who could help me.

#! /usr/bin/env python
import rospy
import time
import actionlib
from my_custom_action_msg_pkg.msg import CustomActionMsgAction, CustomActionMsgGoal, CustomActionMsgFeedback
from std_msgs.msg import Empty
class CommandDroneClass(object):
def __init__(self):
#create messages that are used to publish feedback/result
self._goal = CustomActionMsgGoal()
self._feedback = CustomActionMsgFeedback()
# creates the action server
self._as = actionlib.SimpleActionServer("action_custom_msg_as", CustomActionMsgAction, self.goal_callback, False)
self._as.start()
self.ctrl_c = False
self.rate = rospy.Rate(10)
def publish_once_in_cmd_vel(self, cmd):
"""
This is because publishing in topics sometimes fails teh first time you publish.
In continuos publishing systems there is no big deal but in systems that publish only
once it IS very important.
"""
while not self.ctrl_c:
connections = self._pub_cmd_vel.get_num_connections()
if connections > 0:
self._pub_cmd_vel.publish(cmd)
rospy.loginfo("Publish in cmd_vel...")
break
else:
self.rate.sleep()
def goal_callback(self,goal):
# helper variables
r = rospy.Rate(1)
success = True
# define the different publishers and messages that will be used
self._pub_takeoff = rospy.Publisher('/drone/takeoff', Empty, queue_size=1)
self._takeoff_msg = Empty()
self._pub_land = rospy.Publisher('/drone/land', Empty, queue_size=1)
self._land_msg = Empty()
if self._goal.goal == 'TAKEOFF':
# make the drone takeoff
i=0
while not i == 3:
self._pub_takeoff.publish(self._takeoff_msg)
self._feedback.feedback = 'taking off'
self._as.publish_feedback(self._feedback)
time.sleep(1)
i += 1
elif self._goal.goal == 'LAND':
#make the drone land
i=0
while not i == 3:
self._pub_land.publish(self._land_msg)
self._feedback.feedback = 'landing'
self._as.publish_feedback(self._feedback)
time.sleep(1)
i += 1
if name == ‘main’:
rospy.init_node('move_drone_by_command_server')
CommandDroneClass()
rospy.spin()