can i add some colors to the walls?? i can barely see them.
And in the video that is in the file for make the first exercise of the rosject there are 2 videos. In one of them [ROS Q&A] 031 - How to read LaserScan data - YouTube you say that right it’s 0, front it’s 360 (90 degrees) and left it’s 719(180 degrees) but this didn’t work for me, instead the next photo works.
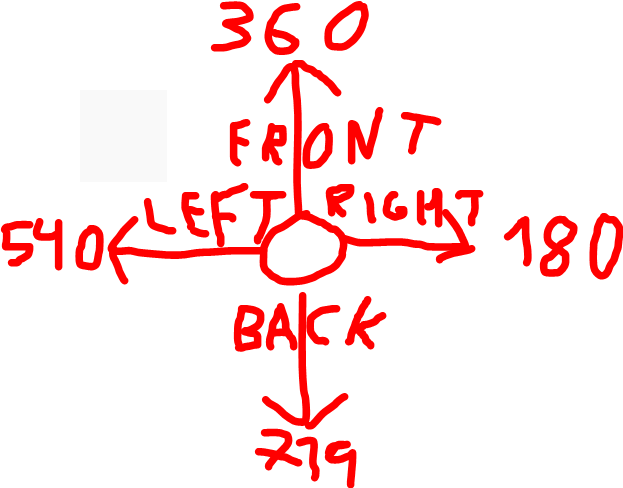
maybe i misunderstood the video, did i?.
This is how i’m reading the scan
if (msg->ranges[360]>0.3){
var.linear.x=0.1;
}
I’m doing this in c++ and the video example is python
Thanks beforehand
Por cierto se nos nota mucho el acento Español jajajaja
1 Like
Hi @AlfMachine ,
I have completed ROS Basic course with Python. I had the same issue.
The laser mounted on the TurtleBot is a 360 degree laser. That is why the second picture of yours works.
Refer my own post here: Incorrect Robot Scan Values in ROS Basics Course - Wall Follower Robot / TurtleBot3
You figured it out yourself!
PS: Even I wanted to change the color of the walls. Even I could barely see where the robot was heading. But I still managed to complete the project.
Anyways, all the best with the rosject!
Regards,
Girish
2 Likes
Thank @AlfMachine @girishkumar.kannan, we’ll consider your suggestion in improving the project.
2 Likes