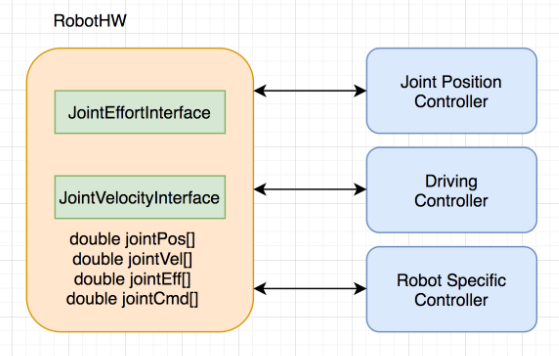
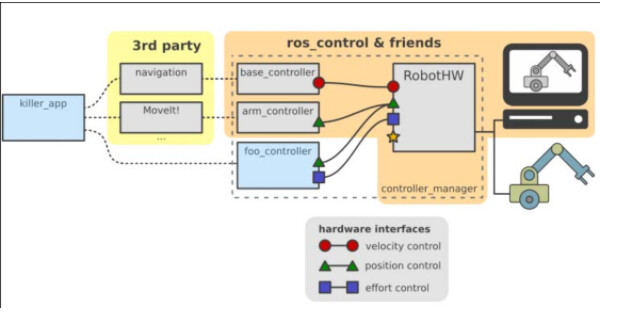
Is there any connection between the hardware interface mentioned In ROS Control, unit 6 and the hardware interface mentioned in the block diagram in unit 2. Unit 6 talks of hardware interfaces as EfforJointInterfaces. VelocityJointInterfaces etc, while unit 2 talks of hardware interfaces as velocity control, position control, effort control etc. Did i interpret it wrong?
the block diagram from Unit 2 uses the more general terms “Velocity Control (Hardware Interface)”, “Position Control (Hardware Interface)” and “Effort Control (Hardware Interface)” whereas Unit 6 talks about the specific name that ros_control has for the implementation of one of such hardware interfaces. In other words what ros_control calls VelocityJointInterface is a velocity control hardware interface. The same applies for the other interfaces.